Tags
Author
Un robot novateur pour les chirurgies peu invasives
De nouveaux développements étonnants bousculent le monde de la medtech. Le secteur des robots chirurgicaux voit notamment apparaitre des évolutions majeures. Au cours de l'été 2018, la startup NISI basée à Hong Kong a annoncé qu'elle avait réalisé avec succès une série d'opérations gynécologiques sur des porcs vivants. Si cela ne semble peut-être pas très spécial au premier abord, la technique déployée est quant à elle innovante. Les chirurgiens ont en effet utilisé un petit robot, inséré par voie rectale. Il s'agit d'une première mondiale dans l'histoire de la médecine, selon l'entreprise.
NISI a été fondée en 2012 et travaille avec les universités de Hong Kong et de Cambridge pour développer un système robotique qui permet des chirurgies complexes et peu invasives dans la région abdominale et pelvienne sans laisser de cicatrices visibles. "Nous voulons devenir le chef de file mondial en matière de robotique chirurgicale non invasive", déclare la Dre Corinna Ockenfeld de NISI. Le succès des opérations chirurgicales de l'été 2018 a donné beaucoup d'élan à la start-up. Les premières interventions chirurgicales chez l'homme sont prévues pour 2021.
Un système chirurgical haute technologie
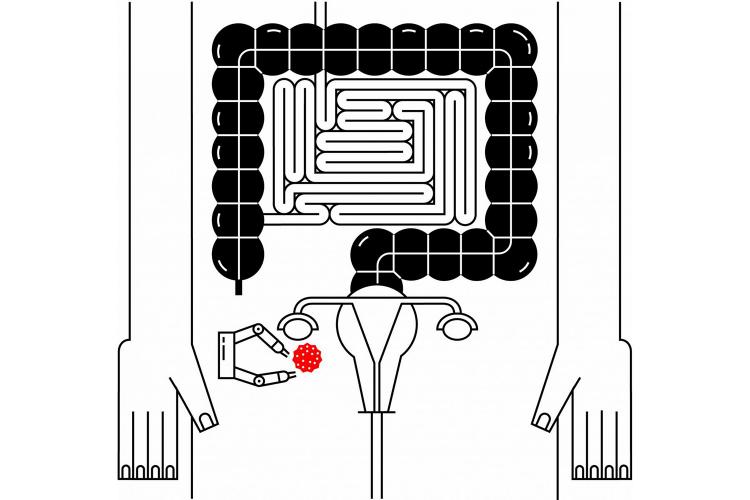
Le principe du nouveau système chirurgical du NISI est le suivant : le robot chirurgical est inséré par un orifice naturel, généralement l'anus ou le vagin. Seule une petite coupure à l'intérieur du corps est nécessaire pour insérer plusieurs instruments robotiques à l'intérieur de l'abdomen. Les systèmes actuels nécessitent plusieurs incisions, une pour chaque instrument. Les avantages de cette nouvelle technologie sont ainsi multiples : moins de pertes sanguines pendant la chirurgie, moins de complications liées aux plaies, un temps de récupération plus court pour le patient et aucune cicatrice visible.
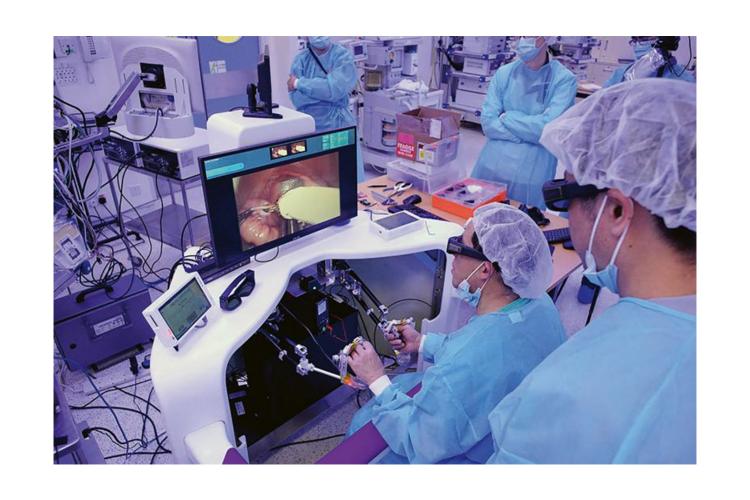
Le robot possède lui-même deux petits bras qui se déploient à l'intérieur de l'abdomen et qui peuvent être contrôlés par le chirurgien à l'aide d'un panneau de contrôle. Les deux bras robotiques sont directement contrôlés par des micromoteurs de maxon et ont jusqu'à huit degrés de liberté. Le système dispose également d'une caméra 2D et 3D haute résolution et d'une rétroaction haptique, ce qui permet au chirurgien de sentir ce qu’il se passe à l'autre bout et de travailler avec une précision encore plus grande.
La qualité des composants motorisés, un élément clé
Amener les robots chirurgicaux à un haut niveau technologique requière plus que des techniciens et des ingénieurs exceptionnels : la qualité des composants est également un élément clé. NISI teste donc différents concepts et combinaisons de composants. « Nous voulons repousser les limites de la technologie médicale et robotique », déclare la Dre Corinna Ockenfeld. En ce qui concerne les moteurs, cela nécessite une taille extrêmement petite et une densité de puissance extrêmement élevée. « Nous travaillons en étroite collaboration avec maxon et échangeons des informations chaque semaine. Nous apprécions vraiment le soutien que nous avons reçu au cours des dernières années. La collaboration avec maxon est très productive et extrêmement précieuse pour les deux parties. »
Les prototypes du système robotique chirurgical NISI utilisent actuellement différents moteurs à courant continu sans balais de la série EC, avec des diamètres allant de 4 à 8 millimètres, complétés par des réducteurs adaptés. Les deux partenaires poussent les entraînements de précision à leurs limites, parfois en dehors des spécifications nominales. Cependant, les moteurs BLDC sont personnalisés pour les besoins spécifiques. Ils exigent une densité de puissance élevée, doivent répondre à des normes de qualité extrêmement strictes et être étanches aux fluides corporels. A l'avenir, les lecteurs seront également biocompatibles.
Les étapes suivantes consistent à rendre l'ensemble du système encore plus petit, à rendre les moteurs encore plus dynamiques et à étendre la plage de travail du robot. « Nous prenons soin de chaque détail et adoptons des approches novatrices pour résoudre les problèmes », précise la Dre Corinna Ockenfeld. Petit à petit, NISI se rapproche de sa vision : faire de la chirurgie non invasive sans cicatrices une réalité courante.