Tags
Author
De temps en temps, on nous interroge sur l'aptitude des moteurs DC maxon à être utilisés comme générateur. Comme nos moteurs sont très efficaces, il en est de même lorsqu'ils sont utilisés comme générateurs. Les calculs de base entre la vitesse et la tension ainsi que le courant et le couple sont très simples. Dans ce qui suit, quelques règles pour une sélection réussie.
Tension continue ou alternative ?
Règle n° 1 : Pour générer une tension continue, choisissez un moteur DC à balais ou utilisez un moteur EC sans balais (BLDC) avec un redresseur de tension. Pour la génération de la tension AC, choisissez un moteur EC sans balais et connectez 2 phases seulement. Les capteurs à effet Hall ne sont pas nécessaires sur les moteurs sans balais.
Constante de vitesse kn
De nombreux générateurs fonctionnent à des vitesses de 1000 tr/min ou moins. C'est une vitesse assez faible pour les petits moteurs. Pour générer 10 V ou plus à 1000 tr/min, il faut une constante de vitesse de seulement 100 tr/min/V ou moins. De tels bobinages sont difficiles à trouver dans le portefeuille de maxon. Il n'y a que quelques enroulements à haute résistance sur des moteurs plus grands qui satisfont à cette exigence. Les moteurs plus petits ont des constantes de vitesse plus élevées.
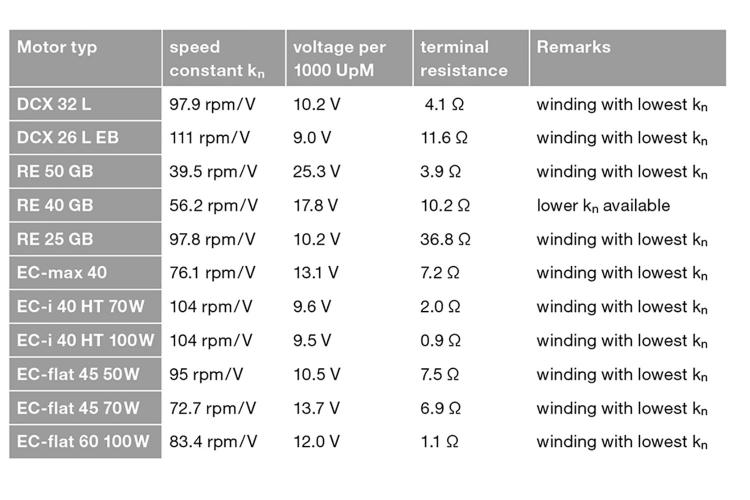
Règle n°2 : Sans tenir compte de la charge, l'enroulement doit avoir une constante de vitesse de kn < n/u (la vitesse du générateur divisée par la tension générée) ou moins. Comme alternative, la vitesse du moteur peut être augmentée par l'utilisation d'un réducteur (voir ci-dessous).
kn = vitesse constante, n = vitesse du moteur, u = tension générée
Résistance
La règle n°2 exige des moteurs avec une constante de générateur élevée. Malheureusement, ces enroulements ont également la résistance la plus élevée. Une résistance élevée réduit la tension de sortie sous charge et la tension de sortie devient très sensible au courant de charge.
Règle n°3 : Pour une tension de sortie stable sur une certaine plage de charge, choisissez plutôt un moteur plus grand où la résistance est plus faible, même sur les moteurs avec une constante de générateur élevée.
Les moteurs EC-i 40 à couple élevé sont très intéressants de ce point de vue.
Restrictions de puissance
Ne choisissez pas le moteur-générateur uniquement en fonction de sa puissance. Pour répondre aux exigences en matière de couple, vous pouvez avoir besoin d'un moteur dont la puissance nominale est bien supérieure à la puissance générée, en particulier si la vitesse du générateur est plutôt faible par rapport aux vitesses typiques des moteurs.
Limites de couple et de vitesse
La quantité de couple sur le générateur définit la taille et le type de moteur-générateur. Sélectionnez un type de moteur dont le couple continu est supérieur au couple du générateur. Lors du calcul du couple ou de la charge actuelle, tenez compte du type de fonctionnement. Le générateur fonctionnera-t-il en continu pendant de longues périodes, ou par cycles de fonctionnement intermittents, ou encore pendant de courts intervalles seulement ? En conséquence, il convient de choisir une taille de moteur offrant un couple ou un courant continu suffisant. Respectez également la vitesse maximale du type de moteur. Toutefois, en raison des vitesses généralement faibles, ce problème ne se pose pratiquement jamais.
Limites de courant et de tension
L'enroulement le plus approprié pour un type de moteur donné découle des exigences en matière de courant et de tension générée. Sélectionnez un enroulement qui peut générer la tension requise U même sous charge. En supposant une vitesse de générateur fixe n, nous avons besoin d'une tension générée par l'enroulement Ut qui est supérieure à U.
Sans tenir compte de la charge, sélectionnez la constante de vitesse selon la règle n° 2, c'est-à-dire un enroulement avec une résistance suffisamment élevée. Comme la capacité de courant diminue avec l'augmentation de la résistance, vérifiez que le courant continu est encore suffisamment important.
Ut = n/kn – Rmot · IL > U
Ut = la tension tachymétrique, Rmot = la résistance du moteur, IL= le courant de charge, kn = vitesse constante, n = vitesse du moteur, u = tension générée
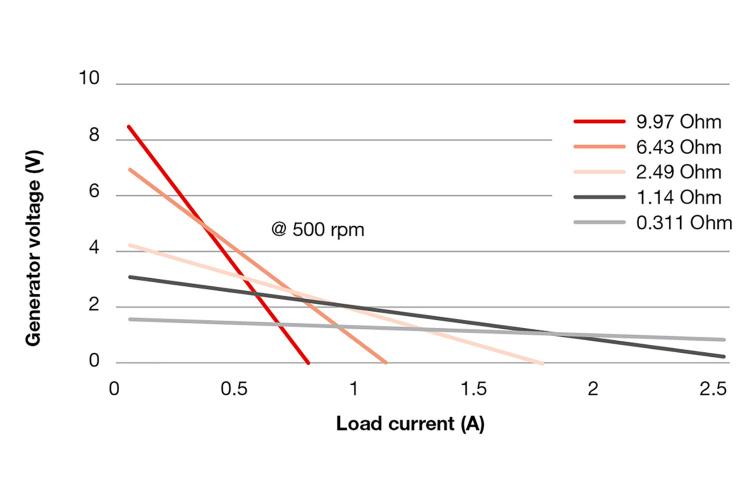
Le graphique montre assez bien les effets ambivalents des différents enroulements.
- Plus la résistance de l'enroulement est élevée, plus la tension générée (à vide) est élevée
- Cependant, plus la résistance du bobinage est élevée, plus la tension générée est sensible aux variations du courant de charge.
Ces effets contradictoires peuvent être éliminés dans une certaine mesure en choisissant des moteurs plus grands qui présentent des résistances plus faibles pour une même constante de générateur (selon la règle n° 3).
Combinaisons motoréducteurs
Règle n°4 : Utilisez des réducteurs pour augmenter les vitesses très basses. Cependant, les réducteurs maxon ne sont pas vraiment adaptés pour être entraînés par la sortie. Utilisez des réducteurs qui peuvent être entraînés par l'arrière, c'est-à-dire des réducteurs planétaires jusqu'à deux étages ou des réducteurs à engrenages droits. (Ou des réducteurs spécialement conçus).
La raison pour laquelle on utilise des combinaisons motoréducteur est le mécanisme d'entraînement très lent des générateurs ; par exemple, entraînés par une turbine éolienne ou hydraulique ou même à la main. Quelques observations et recommandations :
- Dans ces cas, les réducteurs doivent être entraînés en marche arrière. Cependant, les réducteurs maxon ne sont pas vraiment conçus pour un fonctionnement en marche arrière et leur rendement est faible.
- Les réducteurs à haute réduction (3 étages et plus) ne peuvent pas être entraînés par l'arrière, c'est-à-dire qu'ils ne tourneront pas lorsqu'ils sont entraînés par la sortie avec le couple maximum autorisé. Vous pouvez utiliser des réducteurs planétaires à 1 ou 2 étages ; ils peuvent être actionnés depuis la sortie.
- Il est préférable d'utiliser des engrenages droits plutôt que des réducteurs planétaires. Les réducteurs à engrenages droits peuvent plus facilement être rétro-entraînés et l'efficacité de la rétro-entraînement est généralement plus élevée.
Cas particulier : Moteur DC comme tachymètre DC
Règle n°5 : Pour les tachymètres DC, utilisez des moteurs DC avec des balais en métal précieux qui conviennent mieux aux petits courants. Sélectionnez le bobinage en fonction de la tension tachymétrique requise et de la plage de vitesse de votre application. Ne vous inquiétez pas de la résistance de l'enroulement, assurez-vous simplement qu'il y a une résistance de charge de plusieurs kΩ pour maintenir les courants faibles.