Tags
Author
Même si cela a déjà été fait à de nombreuses reprises, la manœuvre d'amarrage entre deux objets dans l'espace est toujours une procédure délicate et potentiellement dangereuse. La vitesse est extrêmement élevée (environ 28 000 km/h dans le cas de l'ISS) et les corrections sont difficiles. Par exemple, lorsque les deux objets sont sur le point de se rencontrer, les propulseurs de manœuvre ne peuvent plus être utilisés car leurs gaz d'échappement peuvent causer des dommages. Pour éviter tout dommage, les véhicules spatiaux sont saisis par un bras robotique installé à bord de la Station Spatiale Internationale (ISS) et amarrés manuellement. Les engins spatiaux habités s'amarrent quant à eux directement dans un processus contrôlé par ordinateur.
Ce type de manœuvre d'amarrage va devenir plus facile et plus sûr à l'avenir, c'est pourquoi l'Agence spatiale européenne (ESA) a chargé ses partenaires industriels de concevoir un nouveau système d'amarrage appelé IBDM (International Berthing and Docking Mechanism). Ce système est conforme à l'International Docking System Standard (IDSS), une norme sur laquelle les principales agences spatiales du monde entier se sont entendues. Le système sera ainsi compatible avec l'ISS et la plupart des autres engins spatiaux. Les premières missions du mécanisme seront effectuées avec le Dream Chaser, un vaisseau qui ressemble à une version compacte de la navette spatiale et qui effectuera bientôt des vols cargo vers l'ISS. L'embarcation est développée par la Sierra Nevada Corporation.
L'énergie d'amarrage est absorbée
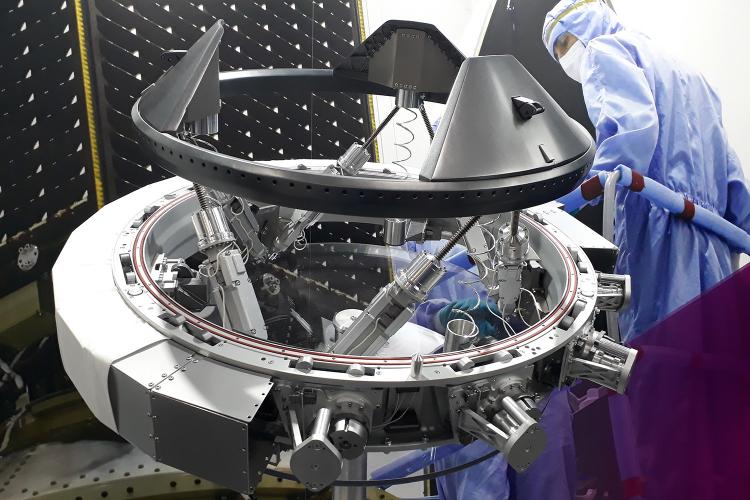
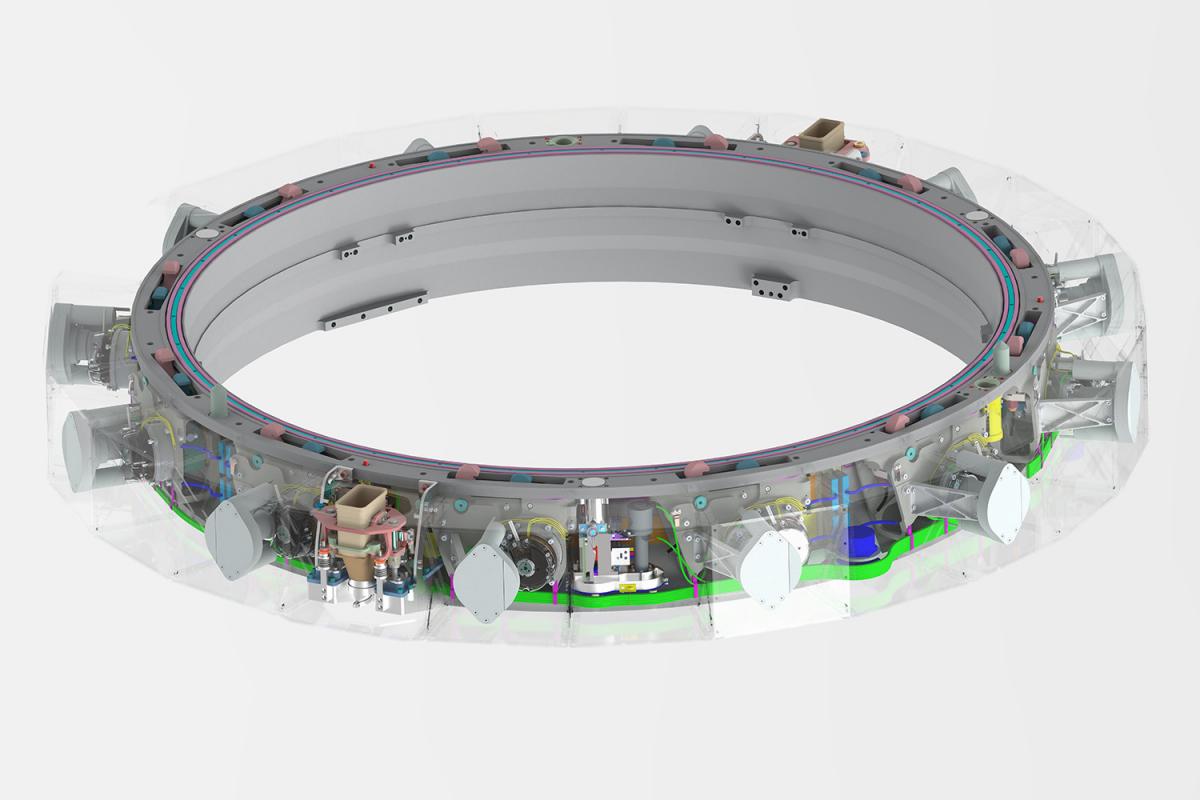
L'IBDM est un système de couplage androgyne. Cela signifie que le connecteur est identique des deux côtés. Il se compose d'une bague intérieure dure (Hard Capture System) et d'une bague extérieure souple (Soft Capture System) qui possède six degrés de liberté et des capteurs de force. La bague extérieure absorbe d'abord l'énergie d'amarrage. Ensuite, la liaison finale, étanche à l'air, est réalisée et sécurisée par des crochets mécaniques qui serrent les deux engins spatiaux l'un contre l'autre.
SENER est responsable du développement et de l'installation du Système de Capture Dure. L'entreprise travaille actuellement sur le modèle de qualification, qui devrait être testé en 2020. « Ensuite, l'IBDM doit être utilisé aussi rapidement que possible sur un vol de ravitaillement pour l'ISS », explique Gabriel Ybarra, du SENER. L'une des prochaines étapes consisterait à l'utiliser dans la Station Spatiale Lunaire de la NASA, prévue pour être mise en orbite autour de la Lune et qui pourrait servir dans le futur de point de lancement pour des missions habitées vers Mars.
Deux systèmes pour une sécurité maximale
Pour les ingénieurs du SENER, il s'agit d'un projet stimulant : « Nous devions d'abord comprendre parfaitement toutes les exigences de l'ESA et de la NASA afin de trouver le moyen de les satisfaire. Et surtout en ce qui concerne la sécurité, car le mécanisme d'amarrage peut également faire face à des vols habités. »
En plus d'être légers et de fournir le couple requis, les moteurs électriques utilisés doivent être extrêmement fiables. C'est pourquoi SENER travaille depuis plusieurs années avec le spécialiste de la motorisation, maxon.

Pour le système de capture dur, Maxon a développé un moteur plat EC 32 à deux bobinages et un réducteur planétaire GPX 22 UP (ci-dessus).
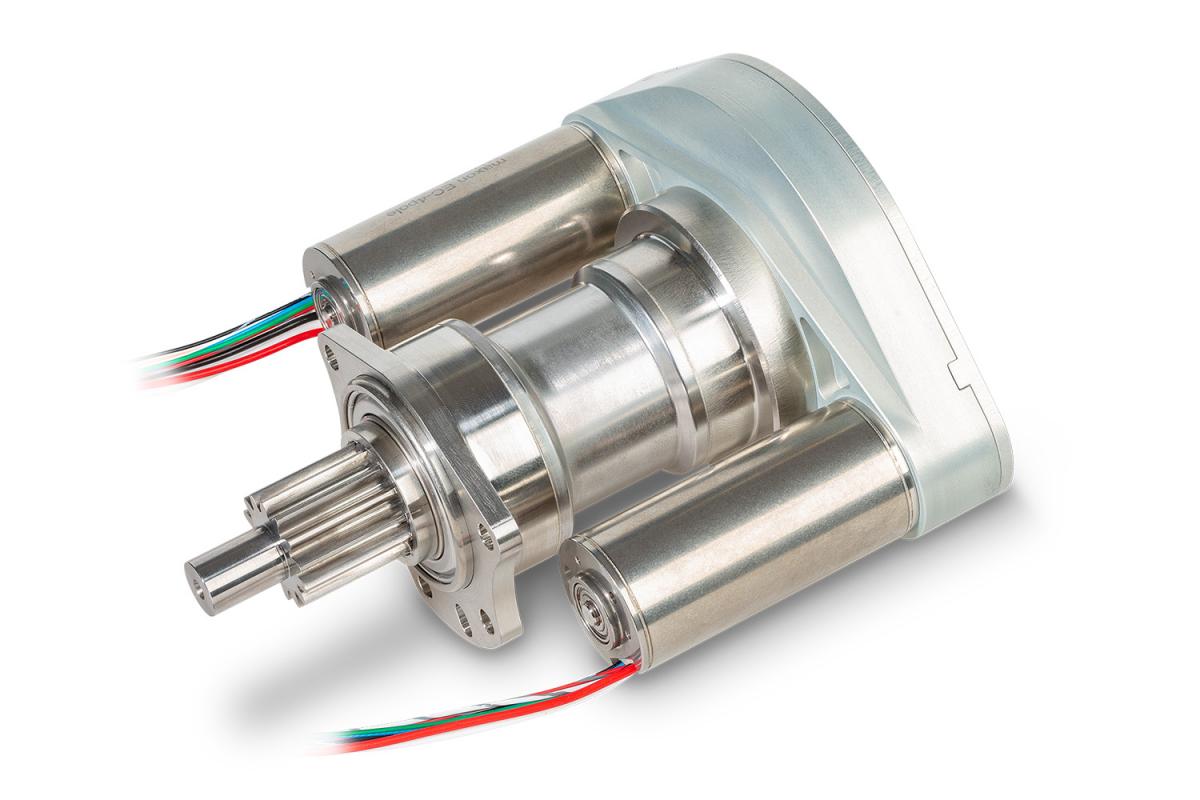
Il y a douze systèmes d'entraînement maxon qui alimentent les crochets de verrouillage. Chacun d'entre eux est constitué de deux moteurs EC-4pole 30 sans balais et d'un réducteur GPX 42 UP (en bas).
Les ingénieurs de maxon ont développé pour SENER deux systèmes motorisés qui peuvent être utilisés pour exécuter une grande variété de fonctions. Le premier entraînement se compose de deux moteurs EC-4 pôles sans balais et d'un réducteur GPX UP. Douze de ces actionneurs alimentent les crochets de verrouillage du mécanisme de connexion IBDM. Le deuxième entraînement combine un moteur plat et un réducteur planétaire. Il est utilisé à onze endroits, pour gérer les connexions plug-in et les œillets de retenue, ainsi que pour d'autres fonctions auxiliaires.
Le mécanisme d'amarrage IBDM étant une application critique pour le vol, des systèmes d'entraînement redondants sont nécessaires. La sauvegarde doit fonctionner même en cas de défaillance du disque principal. Ceci est souvent résolu au moyen d'un moteur de secours qui peut prendre le relais en cas d'urgence. C'est l'approche utilisée pour l'actionneur du crochet de verrouillage. Pour l'autre système d'entraînement, les ingénieurs de maxon ont toutefois trouvé une solution différente et non conventionnelle : un stator supplémentaire est utilisé à la place d'un moteur supplémentaire. Le moteur plat dispose ainsi de deux stators et donc de deux enroulements, chacun d'eux étant capable d'entraîner le rotor de manière indépendante - une solution ingénieuse, qui garantit sécurité et gain de place.
Gabriel Ybarra met en lumière la collaboration avec maxon : « L'équipe comprend nos exigences et est très rapide dans les modifications de design. » De plus, les deux partenaires sont passionnés par les systèmes mécatroniques. « C'est formidable d'être impliqué dans tout le cycle, de la conception à la production, en passant par les tests. Cela rend le projet extrêmement intéressant. Et quand le système bouge pour la première fois, c'est comme regarder vos enfants faire leurs premiers pas. »