Tags
Author
Chirurgies mini-invasives Keyhole assistées par robot
L'utilisation de robots en chirurgie mini-invasive Keyhole offre de nombreux avantages par rapport à la chirurgie mini-invasive traditionnelle, notamment une meilleure vision, une précision optimisée et une plus grande dextérité. Le projet SMARTsurg a été mis en place pour développer un système avancé permettant d'effectuer des chirurgies mini-invasives assistées par robot.
Le projet implique une équipe de dix institutions à travers l'Europe, composée de partenaires cliniques, académiques et industriels très expérimentés. L'une de ces institutions est le Bristol Robotics Laboratory (BRL). maxon a travaillé avec BRL sur plusieurs projets et a été ravi d'être sollicité pour participer au projet RAMIS.
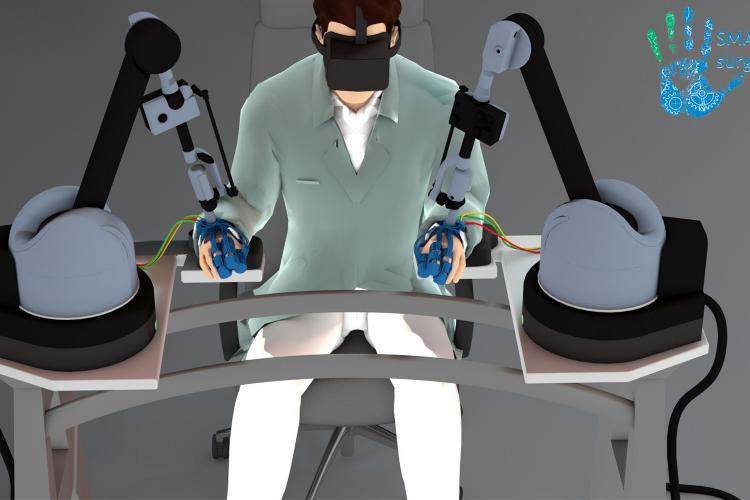
L'équipe utilise des moteurs et des contrôleurs DC maxon pour piloter et positionner l'instrument chirurgical à 3 doigts qui pénètre dans le corps. L'instrument sera contrôlé par des exosquelettes qui s'adaptent sur les mains du chirurgien. De plus, ils développent également des lunettes intelligentes pour permettre au chirurgien d'avoir une vision réaliste de ce qui se passe à l'intérieur du corps. L'équipe a trouvé les produits maxon faciles d'utilisation et dotés de la précision et de la haute densité de puissance nécessaires pour cette application.
BRL a utilisé le configurateur en ligne maxon pour sélectionner et configurer le moteur avec balais DCX 19 S, le réducteur GPX 22 et le codeur ENX 10. L'avantage de l'utilisation du configurateur maxon réside dans les courts délais de livraison.
La conception en ligne des produits maxon a permis d'obtenir le meilleur compromis en termes de couple de sortie, de vitesse et de retour d'informations sur les codeurs. Les dimensions peuvent également être adaptées, simplement et rapidement, en incluant tous les détails techniques du package généré - y compris le modèle CAO 3D - en quelques clics. Le contrôleur de positionnement maxon EPOS2 et le protocole de communication CAN ont été utilisés pour s'assurer que chaque axe réponde aux commandes du contrôleur maître en termes de position, vitesse et couple.
Sanja Dogmadzi, professeure de robotique médicale à BRL, a expliqué : " Bien que la popularité de RAMIS ne cesse d'augmenter, le potentiel d'amélioration des résultats pour les patients et le potentiel d'autres interventions ne sont pas pleinement réalisés, principalement en raison des limites importantes des instruments actuels, du contrôle et du feedback au chirurgien. Plus précisément, l'accès restreint, le manque de rétroaction sur la force et l'utilisation d'outils rigides dans des espaces confinés remplis d'organes posent des défis à l'adoption complète. »
Le développement des plateformes chirurgicales robotisées a introduit la vision 3D et des améliorations significatives dans les niveaux de dextérité. La chirurgie mini-invasive assistée par robot réduira la charge de travail du chirurgien, raccourcira le temps de formation et offrira précision, sécurité et temps d'intervention réduit.