Tags
Author
Avec la croissance et le déploiement des robots collaboratifs, le besoin d'une grande variété de pinces et d'effecteurs finaux en général s'est accru. L'une des applications les plus complexes est la mesure et le contrôle automatisés de petites pièces. Un tel dispositif doit fournir un positionnement à haute résolution avec des résolutions aussi faibles que 2,5 micromètres qui peuvent être disponibles en permanence pour les logiciels décisionnels dans les applications d'automatisation. C'est pourquoi New Scale Robotics (NSR), une division de New Scale Technologies, a décidé de concevoir et de fabriquer une de ses dernières pinces.
Conçu pour les plus petits robots collaboratifs, le NSR-PG-10-20, Precision Parallel Gripper, est un système mécatronique qui intègre le moteur, les capteurs, les guidages à roulements de précision, l'électronique d'entraînement et de commande, ainsi que le firmware intégré pour l'automatisation, dans un dispositif. Au cours du processus de conception, NSR a décidé que la pince devait offrir une intégration plug-and-play qui pouvait être installée en quelques minutes sur la ligne Universal Robotics (UR) de petits cobots. Le NSR-PG-10-20 offre aux utilisateurs la plus petite taille et la masse la plus précise possible. Tous les circuits d'alimentation et de commande sont situés dans le port d'outil du robot et les bagues collectrices, de sorte qu'aucun câble externe ou carte électronique n'est nécessaire. Pour installer le préhenseur, il suffit de le monter sur la bride de l'outil du robot UR et de connecter le câble unique au port E/S de l'outil UR. Les commandes de mouvement sont reçues par l'interface d'E/S d'outils à 8 broches du robot. Aucun câble externe ou électronique séparée n'est nécessaire, ce qui permet une rotation totale ou infinie de l'articulation du poignet du robot UR sans interférence de câble.

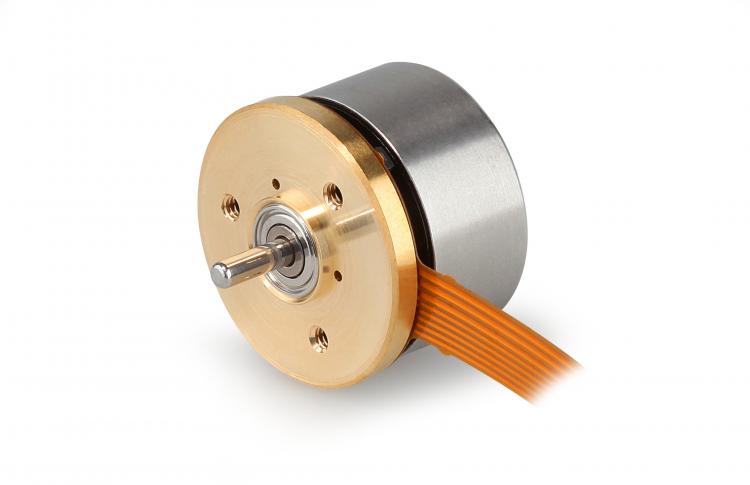
La préhension parallèle de précision NSR-PG-10-20 intègre le moteur plat EC-20 de maxon pour des opérations de haute précision
Le préhenseur parallèle de précision intègre un capteur de position absolue interne spécialement conçu pour les applications de métrologie automatisée, offrant une grande précision pour la manipulation, la mesure, le tri et l'assemblage de petites pièces complexes. Les pinces de préhension ont dû fournir des mouvements rapides et précis à plusieurs reprises sur une longue durée de vie.
Contrôle précis du mouvement
Au cours du processus de conception, NSR a étudié les besoins de sa pince parallèle de précision et a choisi le moteur à courant continu sans balais EC-20, conçu et fabriqué par maxon. Ce moteur offre jusqu'à cinq types d'enroulement ainsi que des codeurs intégrés. Plusieurs sorties de puissance sont disponibles, et les moteurs offrent une grande stabilité et un fonctionnement silencieux. Les moteurs ont été principalement choisis en raison de leur masse extrêmement faible de seulement 15 grammes ainsi que de leur couple continu élevé de 3,75 mN-m. L'excellent rapport couple/masse des moteurs permet au NSR-PG-10-20 d'atteindre une force de préhension réglable de ±3 à 10 N avec un rapport de transmission modeste de 16:1. La pince de préhension est équipée d'un entraînement symétrique par courroie dentée d'une portée de 20 mm. De plus, la tension, le courant et le couple de fonctionnement correspondent parfaitement à l'alimentation électrique interne du robot.
Le moteur rotatif BLDC entraîne la réduction des engrenages à une courroie dentée qui convertit la rotation en mouvement linéaire. Un capteur d'angle séparé est utilisé pour mesurer l'angle de l'arbre du moteur, tandis qu'une électronique numérique séparée est utilisée pour générer le courant d'entraînement triphasé nécessaire au fonctionnement. Ce mécanisme fournit le mouvement linéaire nécessaire pour ouvrir et fermer les doigts de préhension utilisés pour saisir et libérer les petites pièces. Les doigts de préhension sont capables de saisir la pièce de l'extérieur ou de l'intérieur selon l'application. Grâce à l'utilisation du capteur intégré mentionné ci-dessus, la résolution de mesure linéaire de la pièce de la pince est de 2,5 micromètres. La vitesse d'ouverture/fermeture de la pince est de 20 mm/seconde et la plage d'ouverture/fermeture est de 20 mm.
Selon David Henderson, PDG de NSR, « Les parties délicates de la conception consistaient à maintenir la petite taille, la hauteur et la faible masse de la pince tout en offrant des caractéristiques de position et de vitesse en boucle fermée. C'était aussi un défi de trouver un moteur de faible puissance et de faible courant qui nous permettait d'utiliser l'alimentation interne du robot. » L'EC-20 Flat de maxon a permis à NSR d'avoir le levier nécessaire pour fournir le produit dont leurs clients avaient le plus besoin, tout en étant facile à installer et à utiliser. L'intégration mécanique a été la partie la plus facile. L'entreprise a utilisé un EC-20 Flat sans capteur d'angle et a fourni son propre capteur d'angle externe pour la commutation. « A l'avenir, nous prévoyons d'élargir notre gamme de produits pour inclure des pinces avec des forces de préhension plus élevées - et donc des masses et des moteurs de puissance plus élevée, des gammes de préhension plus longues et des capteurs de force intégrés pour améliorer le contrôle des forces », a déclaré M. Henderson.
La pince est équipée de doigts interchangeables. Le NSR-PG est livré avec les doigts de l'usine installés pour que les utilisateurs puissent se mettre directement au travail. La pince de préhension permet également d'apprendre la position des doigts lorsqu'elle est utilisée avec les robots UR3, UR5 et UR10 d'Universal Robotics, ainsi qu'avec les robots UR3e, UR5e et UR10e de la dernière gamme eSeries de la société. Déplacez manuellement les doigts à la position souhaitée et réglez-les à l'aide du pendentif d'apprentissage - un processus familier à quiconque a utilisé un robot UR en mode apprentissage. La position peut être répétée jusqu'à 0,01 mm. En réglant les positions d'ouverture et de fermeture des doigts en fonction de la pièce à usiner, l'utilisateur peut minimiser le mouvement du doigt (course) pour chaque opération, économisant ainsi temps et énergie. Dans l'ensemble, le NSR-PG-10-20 permet à l'utilisateur d'automatiser des tâches de mesure et de contrôle de la qualité répétitives et à forte intensité de main-d'œuvre afin que le cobot UR devienne un outil puissant pour les applications métrologiques.
Trouver le bon moteur pour de telles applications spécifiques peut s'avérer une tâche ardue. L'EC-20 Flat de maxon a été un élément clé dans la conception et la fabrication de la pince parallèle de précision NSR-PG-10-20, qui a permis à NSR de répondre aux besoins de ses clients.