Tags
Author
L'entraînement d'un moteur sans balais nécessite une électronique de commande pour une commutation précise. Cela n'est toutefois possible que si l'électronique de commande « connaît » à tout moment la position exacte du rotor. Traditionnellement, ces informations étaient fournies par des capteurs, par exemple des capteurs à effet Hall, installés à l'intérieur du moteur. Mais cela peut être réalisé différemment. Les méthodes de commande sans capteur utilisent les informations de courant et de tension du moteur pour déterminer la position du rotor. La vitesse du moteur peut alors être dérivée des changements de position du rotor et cette information peut être utilisée pour contrôler la vitesse. Des méthodes de contrôle sans capteur plus avancées permettent même de contrôler le courant (couple) et la position. Le fait de ne pas tenir compte des capteurs présente de nombreux avantages, notamment une réduction des coûts et de l'encombrement, car les câbles, les connecteurs et les circuits électroniques sensibles deviennent inutiles.
Les contrôleurs sans capteur de maxon utilisent trois principes de base qui sont adaptés spécifiquement aux moteurs maxon BLDC.
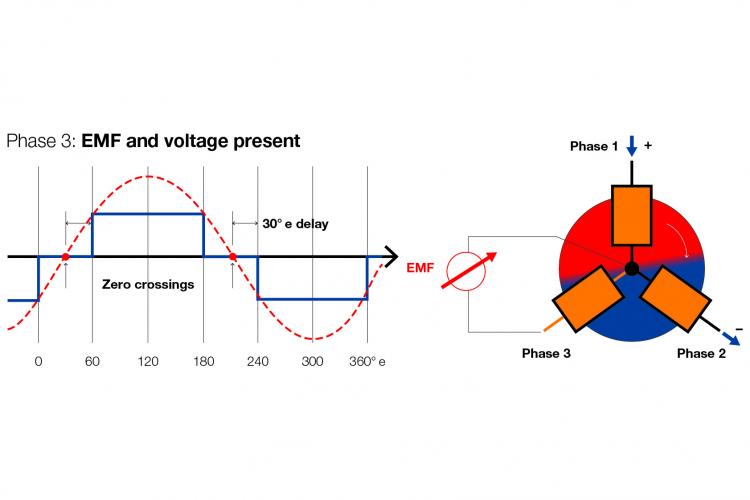
Principe 1 : Méthode EMF avec passage par zéro
La méthode EMF avec détermination du passage par zéro utilise la tension induite (ou EMF) dans la phase non alimentée pendant la commutation de bloc. Le passage par zéro a lieu au milieu de l'intervalle de commutation (fig. 1). La temporisation jusqu'au point de commutation suivant peut être estimée à partir des étapes de commutation précédentes.
La méthode EMF avec passage par zéro ne fonctionne que lorsque la vitesse est suffisamment élevée, car l'EMF devient zéro à l'arrêt. Le démarrage du moteur nécessite un processus spécial, similaire à celui de la commande de moteur pas à pas, et doit être configuré séparément. La commutation sans capteur n'est possible qu'à partir d'une vitesse de rotation de moteur de 500-1000 tr/min. La fréquence du pas de commutation est utilisée pour le contrôle de la vitesse. Le peu d'informations en retour impose des contraintes sur la dynamique du moteur, bien que cela puisse être amélioré en intégrant des méthodes d'estimation dans l'algorithme de contrôle (observateur, filtre de Kalman, etc.). La méthode EMF avec passage par zéro présente également de nombreux avantages : elle fonctionne pour tous les modèles de moteurs brushless, est robuste et économique. Cette approche est utilisée dans de nombreux produits standard, tel que le module maxon ESCON 50/4 EC-S.
Principe 2 : Méthode EMF basée sur l'observateur
Les méthodes EMF basées sur des modèles ou des observateurs utilisent des informations sur le courant moteur pour déterminer la position et la vitesse du rotor. L'approche basée sur un modèle permet d'obtenir une résolution beaucoup plus élevée de la position du rotor. Ceci permet la commutation sinusoïdale (ou FOC, Field Oriented Control), avec tous ses avantages : rendement plus élevé, production de chaleur plus faible, moins de vibrations et de bruit. Cependant, la méthode EMF basée sur l'observation nécessite également une vitesse minimale de plusieurs centaines de tours/minute pour fonctionner correctement.
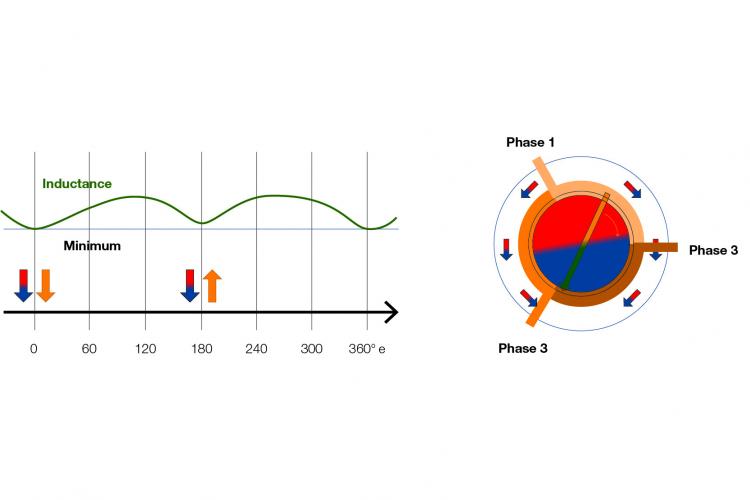
Principe 3 : Méthodes d'anisotropie magnétique
Les méthodes basées sur l'anisotropie magnétique déduisent la position du rotor de l'inductance du moteur, qui est minimale lorsque les flux magnétiques du rotor et du stator sont parallèles dans le retour magnétique (figure 2). La mesure s'effectue au moyen de brèves impulsions de courant qui ne font pas bouger le moteur. Contrairement aux méthodes basées sur les CEM, cette méthode fonctionne également à l'arrêt ou à très basse vitesse et permet une commutation sinusoïdale. Les signaux mesurés dépendent fortement du type de moteur. La position du rotor est déterminée dans un modèle du moteur, qui doit être paramétré et adapté pour chaque moteur. Les contrôleurs basés sur l'anisotropie magnétique sont donc des produits très spécifiques - "plug and play" n'est pas une option. L'effort de calcul nécessaire pour évaluer la position du rotor limite également la vitesse maximale.
Pourquoi un contrôle sans capteur ?
Dans les applications sensibles au prix, l'utilisation de moteurs sans capteur peut réduire le coût. Les capteurs Hall, codeurs, câbles et connecteurs deviennent inutiles. Les applications typiques dans ce domaine sont les ventilateurs, les pompes, les scanners, les broyeurs, les perceuses et autres applications à rotation rapide avec une performance de contrôle relativement modeste qui ne nécessitent pas un démarrage contrôlé. Pour les grandes quantités, une version personnalisée du contrôleur à base de champs électromagnétiques s'impose.
Optimisation des coûts pour des performances de contrôle élevées
Les économies de coûts ne sont pas la seule raison d'opter pour une commande sans capteur. Les applications telles que les entraînements de portes ou de vélos nécessitent des performances élevées du contrôleur. La commande du moteur sans à-coups à partir de zéro tr/min est importante, de même qu'une dynamique élevée et une commutation sinusoïdale pour éviter le bruit. Tout cela doit être réalisé sans l'utilisation d'un codeur coûteux. Au cours des dernières années, des contrôleurs sans capteur de haute qualité basés sur la méthode d'anisotropie se sont établis, y compris le nouveau contrôle sans capteur haute performance (HPSC, voir ci-dessous) de maxon. Toutefois, l'effort d'ingénierie requis pour adapter les paramètres du modèle ne peut être justifié que pour des quantités supérieures à quelques centaines.
Conditions ambiantes difficiles
La commande sans capteur peut également être nécessaire dans les situations où l'électronique du capteur vulnérable doit être évitée dans un moteur. Exemples : applications à des températures ambiantes très élevées ou très basses, nettoyage et stérilisation dans la technologie médicale, ou rayonnement ionisant dans l'espace, les installations nucléaires ou les milieux médicaux. Le nombre réduit de connecteurs de moteur facilite également l'intégration si l'espace est limité.
La qualité de contrôle requise dépend de l'application. La méthode sans capteur qui convient le mieux doit être décidée au cas par cas. Par exemple, les outils dentaires portatifs pour le perçage ou le meulage nécessitent des vitesses de rotation élevées, tandis que les vis de fixation en chirurgie nécessitent des vitesses de rotation inférieures et un couple de serrage contrôlé.
Conclusion
Il y a trois raisons principales pour choisir la commande sans capteur : Economies de coûts, d'espace et d'exploitation dans des environnements défavorables aux capteurs. La méthode EMF avec détermination du passage par zéro est très répandue dans les applications sensibles aux coûts qui fonctionnent à des vitesses élevées. La commande sans capteur à partir de l'arrêt et à basse vitesse nécessite des méthodes plus avancées. L'effort de mise en œuvre est plus important et comprend la modélisation et le paramétrage. Les économies de coûts sont secondaires. Le contrôle orienté sur le terrain permet d'obtenir un rendement plus élevé, moins d'accumulation de chaleur et un niveau de vibration et de bruit plus faible. Tous ces avantages s'appliquent particulièrement aux appareils médicaux portatifs.

Régulateurs sans capteur maxon
Le module HPSC 24/5 (High Performance Sensorless Control) est un nouveau développement de maxon, il s'agit d'une plate-forme de matériel et de logiciels spécifiques au client. HPSC est toujours une solution personnalisée et n'est donc pas un produit de catalogue. Ce qu'il y a de spécial dans ce développement : à l'arrêt et à basse vitesse, on utilise d'abord la technique de commande basée sur l'anisotropie magnétique (principe 3). Puis, lorsque la vitesse est plus élevée, une transition en douceur vers une méthode EMF basée sur l'observation (principe 2) suit. Le microprogramme du module est personnalisé pour chaque système d'entraînement. Dans le cadre d'un processus de réglage spécial, plus de 120 paramètres sont automatiquement ajustés en fonction de l'empreinte digitale de chaque moteur. Un exemple de l'utilisation de HPSC est l'outil médical portable développé récemment par maxon.
Le module ESCON 50/4 EC-S est le seul contrôleur sans capteur de maxon qui figure dans le catalogue de produits (commutation de blocs avec méthode EMF et détermination du passage par zéro). Le Sensorless Controller 24/1 est une alternative pour les plus petits moteurs EC (jusqu'à environ 10 mm de diamètre). Cependant, il n'est pas listé dans le catalogue ou dans l'e-shop.