Tags
Author
Souvent, les clients viennent nous demander des conseils sur le type de contrôleur dont ils ont besoin pour leur application, et l'un des nombreux facteurs à prendre en compte pour recommander un contrôleur est de savoir s'il s'agit d'un contrôleur 1Q ou 4Q. Maxon offre une variété de contrôleurs, et certains d'entre eux sont 1Q comme la famille des modules DEC, et d'autres sont 4Q comme les familles ESCON, EPOS2, EPOS4, et MAXPOS. La vraie question ici est de savoir ce que cela signifie réellement pour le client et son application.
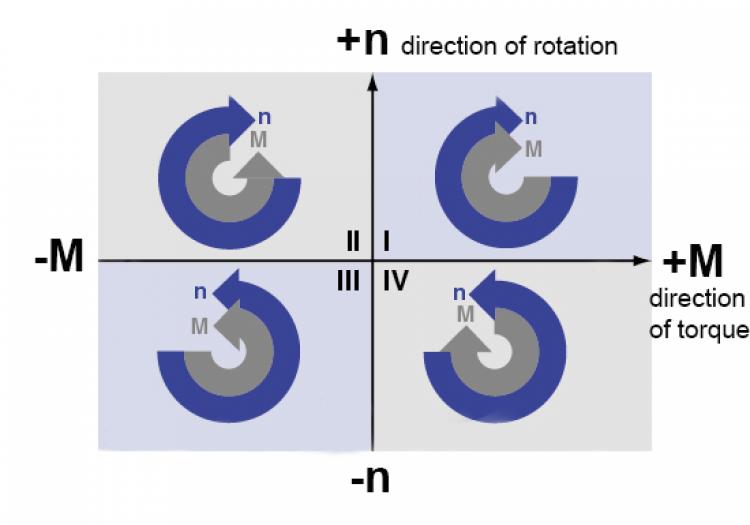
Tout d'abord, nous aimerions commencer par vous montrer un diagramme ci-dessous représentant la vitesse et le couple moteur sur les 4 quadrants de fonctionnement (n=vitesse, M=couple) :
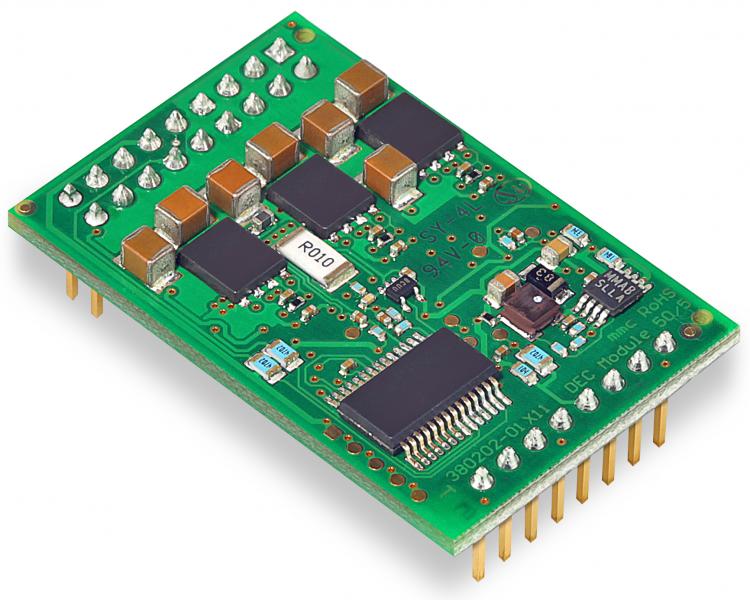
1-Q Régulateur de vitesse DEC Modul 50-5
Contrôleurs de vitesse 1-Q (module DEC)
Notez que les quadrants 1 et 3 indiquent la vitesse et le couple du moteur pointant dans la même direction. Les contrôleurs 1-Q seraient les contrôleurs qui fonctionnent dans ces deux quadrants, voir ci-dessous pour quelques caractéristiques des contrôleurs 1-Q :
- Ne peut accélérer la vitesse et le couple du moteur que dans le même sens (ne peut fonctionner que dans le premier ou le troisième quadrant)
- Permettre au courant du moteur de circuler dans un seul sens
- Ne disposent pas d'un frein/décélération régulé (vous ne pouvez pas appliquer un couple/courant moteur dans le sens de rotation opposé pour ralentir le moteur) -> Le freinage est donc souvent lent et les entraînements ne décélèrent qu'à l'aide du frottement.
Exemples d'applications :
- Module DEC (Simple Speed control) : Ventilateurs, Pompes, Entraînements de coupe, Entraînements de stores

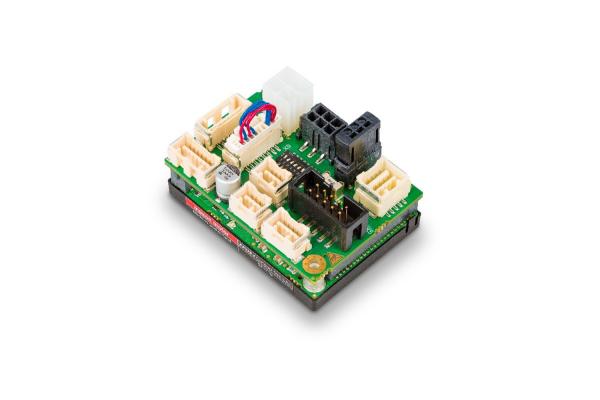
Contrôleur 4-Q ESCON 50-5
Contrôleurs 4-Q (ESCON, EPOS, MAXPOS)
Remarquez que les quadrants 2 et 4 indiquent la vitesse et le couple du moteur pointant dans la direction opposée. Avec un contrôleur 4-Q, vous êtes libre de fonctionner dans n'importe lequel des quadrants indiqués dans le diagramme, voir ci-dessous pour quelques caractéristiques des contrôleurs 4-Q :
- Maintenir la vitesse en cas de changement de charge dans les deux sens (que ce soit en accélérant ou en freinant)
- Peut fonctionner dans les quatre quadrants
- Peut freiner activement la vitesse du moteur (vous pouvez appliquer un couple/courant moteur dans le sens opposé au sens de rotation)
- Peut avoir un retour d'énergie du moteur vers le contrôleur (alimentation électrique) lors du freinage
- Réagit rapidement à toute modification de la valeur de consigne de la vitesse
- Sont obligatoires pour le contrôle de la position
Exemples d'applications :
- ESCON (contrôle dynamique du courant/de la vitesse) : Entraînements de convoyeurs, outils à main, scanners
- EPOS2/EPOS4 (bus de positionnement / vitesse / contrôle de courant) : Actionneurs, automatisation de laboratoire, entraînements de porte
- MAXPOS (bus de contrôle de position/vitesse/courant hautement dynamique) : Robotique, Pick-and-place, Traitement à la volée
Pour résumer, les contrôleurs 1-Q et 4-Q ont tous deux leurs avantages et leurs inconvénients, et ce sont les besoins et les exigences du client qui détermineront quel type de contrôleur fonctionnera le mieux pour son application.