Tags
Author
L'objectif principal d'Harmonic Bionics est d'autonomiser les patients et les prestataires de soins en concevant une technologie intelligente qui a facilité un protocole de traitement basé sur les données lors de la prise en charge des déficiences de mouvement neurologiques et musculo-squelettiques. À cette fin, l'entreprise a été chargée de la conception et de l'assemblage complets de son exosquelette bilatéral de membre supérieur Harmony SHR™.
En permettant une intervention précoce, une répétition fonctionnelle et une thérapie basée sur l'intention, l'Harmony SHR offre aux utilisateurs la possibilité d'améliorer l'efficacité de la rééducation du haut du corps. Produit phare de la société, l'Harmony SHR est conçu pour apporter une valeur unique dans trois domaines de pratique : la recherche en neurosciences et en sciences du mouvement, l'évaluation des troubles du mouvement et la rééducation. Harmonic Bionics a sélectionné des composants commerciaux prêts à l'emploi (COTS) à intégrer dans ses différents actionneurs robotiques en fonction des exigences de chacun d'entre eux afin de simplifier les efforts de conception du produit. La société a parfois dû faire des compromis mineurs lors de la phase de conception, par exemple entre la taille de l'actionneur et la capacité de charge/le poids, et entre le couple maximal et la sensibilité au couple. Le produit final est suffisamment solide pour faciliter les exercices physiques sans être trop lourd ou encombrant à utiliser.
Dans les applications typiques des bras robotisés, les personnes doivent être séparées des bras robotisés afin que le robot ne puisse pas les blesser pendant leur déplacement. La plupart des bras robotisés du marché ne sont pas conçus pour interagir avec les humains en toute sécurité : ils ne peuvent pas détecter une personne sur leur chemin ou se déplacer autour d'elle tout en exécutant la tâche programmée. Pour cette raison, les robots traditionnels peuvent être très dangereux pour les personnes avec lesquelles ils interagissent, notamment dans le cadre d'une application de physiothérapie. Ce n'est pas un problème avec l'Harmony SHR, qui a été conçu pour être sensible à la force et être contrôlé par les entrées de force des utilisateurs à la place de consigne de position typiques de la plupart des bras robotiques.
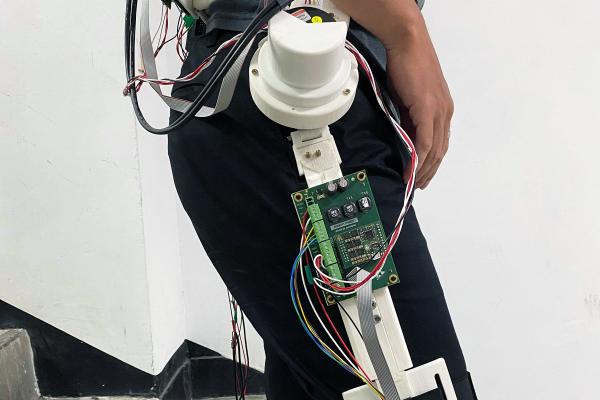
Pour assister les patients dans leurs exercices, il est beaucoup plus important que le robot applique des forces exactes au patient plutôt que de le positionner avec précision (voir photo 1). Le robot a été conçu dans un souci de conformité, de sorte que même de petites forces appliquées au robot peuvent le faire bouger, ralentir ou s'arrêter complètement. Cette caractéristique rend l'exosquelette robotique extrêmement sûr à l'intérieur et à l'extérieur.
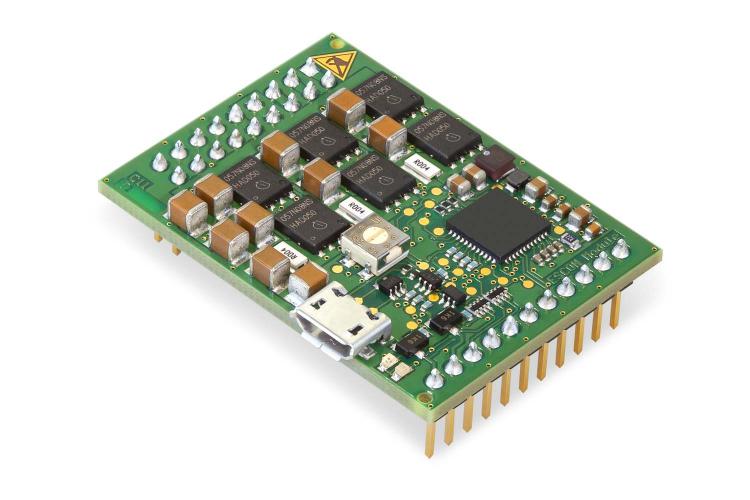
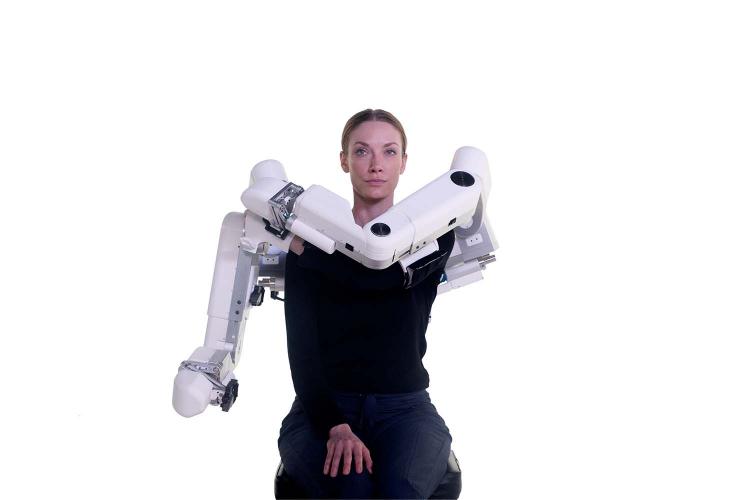
Cette sensibilité à la force a nécessité une nouvelle conception des actionneurs robotiques classiques. Harmonic Bionics a mis au point un actionneur robotique breveté, qui utilise une cellule de charge isolée mécaniquement de toute charge étrangère. Le résultat est que chaque cellule de charge peut détecter la force exercée par la seule articulation du robot sur laquelle elle est montée, tout en étant isolée des forces appliquées aux autres, ce qui maximise la précision de détection de la cellule de charge. Les contrôleurs ESCON, fabriqués par maxon, étaient de taille compacte et faciles à intégrer électriquement et physiquement (voir la photo 2). Nous avons trouvé que le logiciel était simple à utiliser. Les moteurs avaient des fiches techniques informatives qui les rendaient simples à intégrer. Nous avons rarement eu à revoir notre sélection de moteurs, car les fiches techniques nous ont aidés à prendre la bonne décision dès le départ.
Les actionneurs utilisés dans l'exosquelette Harmony SHR sont soit des actionneurs rotatifs avec une sortie de détection de couple et d'angle utilisée pour assister le mouvement du patient, soit des actionneurs linéaires avec une rétroaction de position utilisée pour redimensionner le robot afin de l'adapter à un patient. L'exosquelette est conçu pour fournir une évaluation objective des capacités de mouvement du patient. Le système comprend plus de 80 capteurs qui enregistrent des mesures 2 000 fois par seconde, ce qui lui permet de mesurer avec précision plusieurs paramètres, notamment l'amplitude du mouvement, la génération de force et le nombre de répétitions.
Le système de mouvement utilise plusieurs moteurs conçus et fabriqués par maxon, qui a pu fournir des moteurs répondant à une grande variété de besoins uniques du système. Par exemple, les moteurs plats EC ont fourni le couple de sortie élevé nécessaire dans un boîtier compact adapté à la taille compacte de l'exosquelette (voir photo 3). Les moteurs plats pouvaient également être fournis avec des capteurs d'angle.
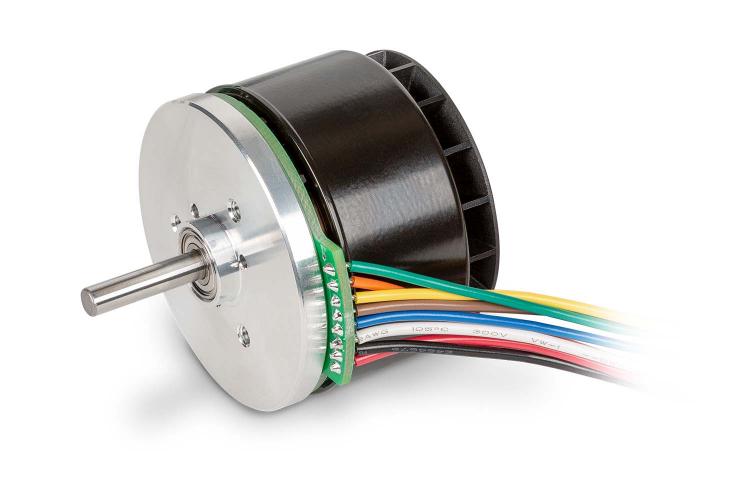
Un moteur plat EC 60 a été choisi parce que son diamètre extérieur était similaire à celui de l'entraînement harmonique et parce qu'ils sont axialement compacts. L'arbre d'un moteur plat DC maxon EC 60 est fixé à un générateur d'ondes d'un entraînement harmonique de taille 17, qui a été choisi pour sa compacité axiale et sa capacité de couple élevée. Les réducteurs de l'entraînement harmonique offraient les réductions élevées, le faible jeu et la capacité de couple élevée dont l'entreprise avait besoin pour sa conception.
Le stator du moteur maxon est monté sur la cannelure circulaire de l’entraînement harmonique. La cannelure flexible de l’entraînement harmonique est fixée à un arbre de sortie soutenu par un roulement à rouleaux croisés, qui supporte toutes les charges qui ne sont pas le couple de sortie de l’actionneur. Comme le roulement à rouleaux croisés supporte les autres charges, la seule charge qui agit sur le capteur de charge est la sortie de couple du capteur de charge.

Le moteur maxon, l’arbre de sortie et l’ensemble d’entraînement harmonique sont libres de tourner dans le roulement à rouleaux croisés. Un support est fixé à la cannelure circulaire de l’entraînement harmonique et au stator du moteur maxon. Un capteur de charge est fixé au support afin que le couple de sortie de l’ensemble global puisse être mesuré à travers le capteur de charge.
L’alignement de l’entraînement harmonique sur l’arbre du moteur maxon est très important pour la durée de vie de l’actionneur. Même un mauvais alignement mineur peut causer une usure prématurée ou une défaillance du mécanisme. Par conséquent, les composants usinés sont fabriqués pour être parallèles à environ 20 microns tandis que la concentricité est maintenue dans environ 30 microns pour aligner la cannelure circulaire au moteur maxon. L’empreinte totale des actionneurs à l’intérieur du robot est d’environ 80 mm de diamètre et 90 mm de longueur. Les composants usinés qui entrent dans chaque actionneur sont fabriqués à partir de divers alliages d’aluminium résistant à la fatigue, et de titane de grade 5 où les contraintes sont élevées.
Le couple de sortie de l’actionneur global est d’environ 30 Nm, et l’actionneur peut produire plus de 100 Nm de crête. L’actionneur est fixé à une cellule de mesure extrêmement sensible, dont la résolution est inférieure à 10 mNm. Chaque actionneur est conçu pour avoir une durée de vie de plus de 3 millions de tours.
Conclusion
Les actionneurs utilisés dans la Harmony SHR sont de conception mûre et devraient nécessiter peu d’améliorations à l’avenir. Selon l’entreprise, il est peu probable qu’elle modifie l’une ou l’autre des composantes commerciales au cours de révisions futures, en particulier les composantes maxon. Les moteurs à courant continu de maxon étaient hautement configurables, en plus de la société a offert des versions à faible jeu de réducteurs pour utilisation dans les actionneurs rotatifs, ainsi que des combinaisons de moteurs à courant continu brossé de petit diamètre + boîte de vitesses planétaire pour créer des actionneurs rotatifs compacts. Les réducteurs d’engrenages de la vis à tête rétractable de l’entreprise pouvaient également être utilisés dans les actionneurs linéaires. Tout cela pour dire que maxon a été en mesure de fournir tous les moteurs et le contrôleur nécessaires pour l’application, fournissant Harmonic Bionics avec un fournisseur unique fiable.