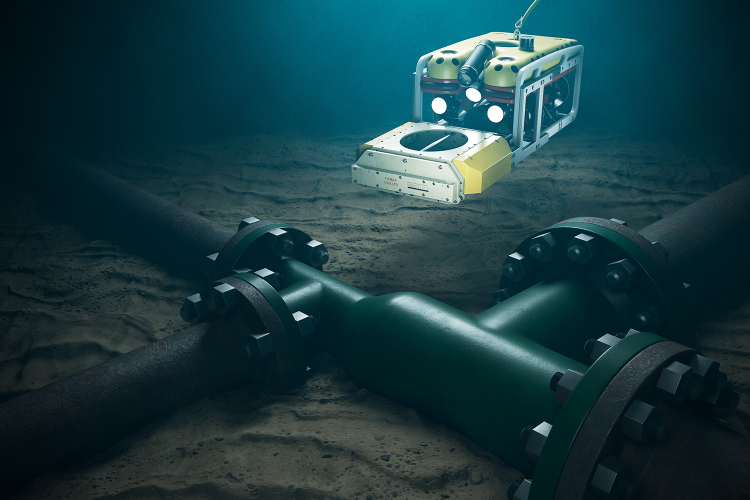
Les eaux froides des fonds marins constituent un environnement inhospitalier pour l'humanité, mais des infrastructures essentielles y fonctionnent. Ces installations sous-marines contribuent à nous fournir des ressources vitales telles que le pétrole, le gaz et les énergies renouvelables, mais pendant ce temps, leurs structures luttent constamment contre l'hostilité de la mer. Cela signifie que la détection et la réparation de la corrosion qui peut se développer sur des composants essentiels, tels que les pipelines et les collecteurs, est une exigence cruciale et régulière.
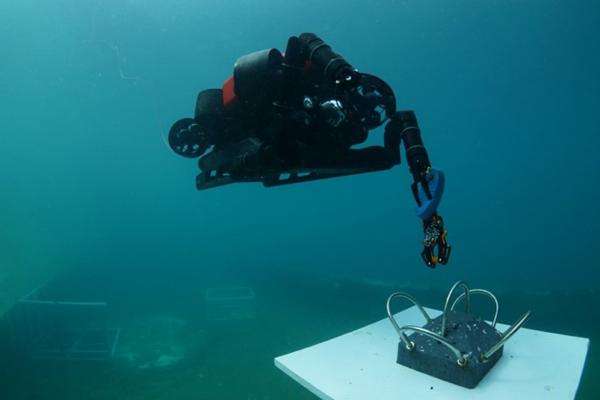
À des profondeurs allant jusqu'à 3 000 mètres, les plongeurs ne peuvent pas y parvenir. Pour transporter des opérateurs à cette profondeur, il faut des submersibles spécialisés, ce qui rend l'inspection sous-marine très coûteuse et prend beaucoup de temps. Mais, propulsé à travers les profondeurs sombres, un véhicule télécommandé (ROV) élimine le risque humain et accélère considérablement l'opération. Le ROV lui-même n'est qu'un élément ; il s'appuie sur un système d'inspection qui doit pouvoir collecter des données afin de fournir une évaluation précise de la situation. Le temps passé en mer par l'opérateur du ROV étant très coûteux, l'inspection de précision doit être effectuée rapidement.
Technologie d'inspection
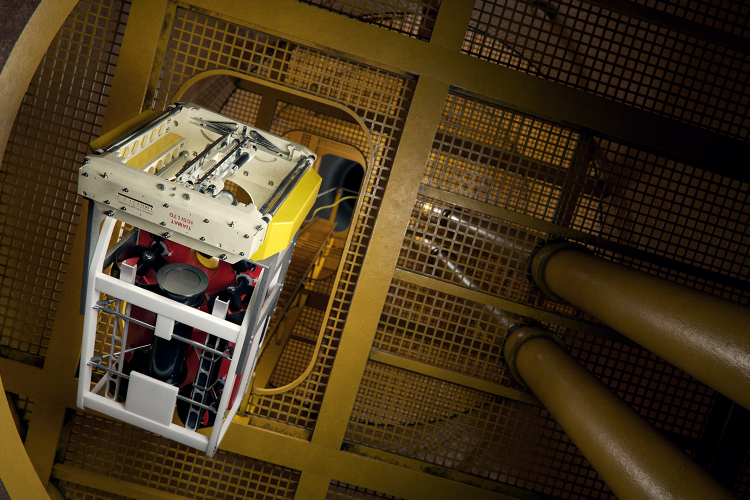
Livrable à partir de n'importe quel ROV, Tiamat, nommé d'après la déesse mésopotamienne de la mer, est une technologie d'inspection sous-marine qui peut détecter l'épaisseur des parois, les fissures et les défauts sur des infrastructures sous-marines complexes, y compris sur des sous-marins et à l'intérieur de monopieux d'éoliennes. L'appareil est capable de collecter des données 200 fois plus rapidement que les scanners sous-marins existants. Tiamat, qui fait actuellement l'objet d'essais en eaux profondes, a été créé par 1CSI, spécialiste de l'inspection sous-marine.
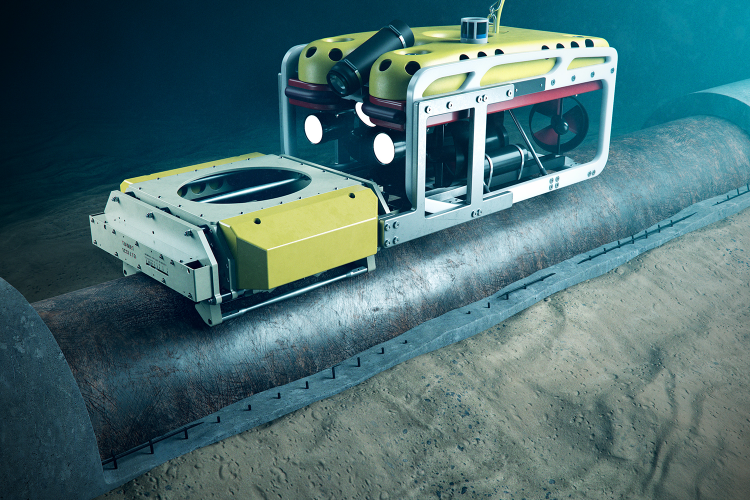
La collecte de données précises est assurée par une image de caméra full HD, ainsi que par une résolution de cartographie d'inspection ultrasonique de 1 mm par 1 mm avec une précision de mesure de champ de +/-0,3 mm. L'inspection ultrasonique des soudures par Tiamat fait appel à des transducteurs à réseau phasé comprenant jusqu'à 250 éléments.
Une fois le ROV guidé sur la zone d'inspection souhaitée, Tiamat se met au travail. Sa large empreinte de balayage de taille A4 balaie l'infrastructure d'avant en arrière, dans un arc de 312 mm sur 154 mm en 10 secondes, avant que le ROV ne guide Tiamat vers la zone d'inspection suivante. C'est cette échelle relativement grande de capture de données, combinée à la vidéo et au réseau de transducteurs, qui permet à Tiamat d'obtenir une couverture de balayage aussi rapide.
Contrôle précis des mouvements
La vitesse et la qualité du balayage dépendent de la stabilité et de la fluidité du déplacement des capteurs Tiamat, qui se déplacent sur un rail s'adaptant aux surfaces planes ou courbées. Un contrôle de mouvement performant est essentiel pour gérer la position et la vitesse du véhicule de la sonde d'inspection, ce qui est réalisé grâce à une paire d'actionneurs sous-marins maxon MA30. Ce système d'entraînement sous-marin est spécialement conçu pour assurer le contrôle à des profondeurs extrêmes. Les actionneurs compacts et légers sont entièrement étanches et très résistants à la corrosion, ce qui garantit leur fiabilité et leur longévité dans un environnement marin difficile.

Les ingénieurs de maxon ont spécifié la solution de mouvement pour assurer un contrôle de précision. Pour améliorer les capacités de mouvement en douceur, les ingénieurs de maxon ont personnalisé le moteur et le réducteur, en réduisant la vitesse et en augmentant le couple afin d'obtenir la puissance optimale pour répondre aux exigences de l'application.

"Les moteurs sont absolument essentiels, car le scannage exige des mouvements fluides et sans frottement", explique Matthew Kennedy, PDG de 1CSI. "Pendant que les transducteurs à réseau phasé collectent les données, le mouvement du véhicule doit être continu et répétable, y compris lors de la mesure sur un objet de diamètre variable. Nous avons choisi Maxon parce que ses moteurs nous offrent la précision dont nous avons besoin".
Les opérations sous-marines sont l'un des domaines les plus difficiles pour le contrôle des mouvements. Avec un ROV et son équipage situés potentiellement à des centaines de kilomètres de tout réapprovisionnement, il est vital que les moteurs alimentant le véhicule de la sonde Tiamat soient très fiables et continuent à fonctionner efficacement quelles que soient la profondeur et les conditions. Il s'agit notamment de surmonter les forces de pression et de flottabilité.
Opérations en eaux profondes
"Les moteurs doivent fonctionner parfaitement à des profondeurs de 3000 m et à une pression de 300 bars, dans un environnement très hostile et froid. Nous voulions un moteur dont nous savions qu'il allait continuer à fonctionner de manière fiable dans ces conditions, année après année, et les moteurs maxon y parviennent", explique Matthew.
Tiamat est suffisamment petit pour être transporté par des ROV de classe "observation" et, mesurant seulement 665 mm sur 672 mm, il peut même scanner dans les endroits les plus restreints en termes d'espace. Le scanner de 1CSI peut être utilisé pour inspecter les réservoirs d'air internes d'un sous-marin, accessibles depuis l'extérieur de la coque même lorsque le navire est en mer, et il peut également pénétrer à l'intérieur de la base monopieu d'une éolienne en mer.
Pour obtenir cette compacité, la solution de mouvement devait être suffisamment petite pour s'intégrer dans le boîtier préconçu, tout en fournissant le couple et la puissance nécessaires. Un réducteur à plusieurs étages a augmenté la longueur totale, mais une spécification technique minutieuse, ainsi que la densité de puissance élevée des moteurs, ont permis d'utiliser une conception de moteur plus courte pour compenser.
1CSI a terminé les essais finaux de Tiamat sur son site d'Aberdeen et passe maintenant aux essais en haute mer dans l'hémisphère sud. Ils ont réalisé un test en direct au large de la côte ouest de l'Afrique en utilisant un système ROV antérieur. Matthew et son équipe sont déjà satisfaits des performances des moteurs maxon à des profondeurs allant jusqu'à 3000 m.
Dans la mythologie, Tiamat était une puissante déesse de la mer, et dans l'environnement marin difficile, la foi doit être forte. Mais grâce à l'innovation de 1CSI, les opérateurs de ROV et les équipes de gestion des infrastructures sous-marines disposent d'une technologie de pointe pour réduire le temps et le coût de l'inspection.