Tags
Author
Le pendule, qui doit son nom à son inventeur japonais Katsuhisa Furuta, a une structure simple. Un bras entraîné tourne dans le plan horizontal et un pendule fixé à ce bras tourne dans le plan vertical. La modélisation théorique et la nécessité de stabiliser ces mouvements sont des questions qui ont longtemps taraudé les cerveaux des ingénieurs. Avec le pendule de Furuta, il y a deux variables : la direction de l'articulation rotative et celle du pendule, qui peuvent être contrôlées. Le pendule est contrôlé en position verticale, instable, tandis que le bras prend n'importe quelle position. Comme il s'agit d'un système non linéaire et instable, il se prête à la réalisation d'expériences, au test d'algorithmes de contrôle existants et au développement de nouvelles méthodes de calcul. Il combine fréquemment des approches issues de domaines de recherche tels que la robotique, la théorie du contrôle et le contrôle informatisé.
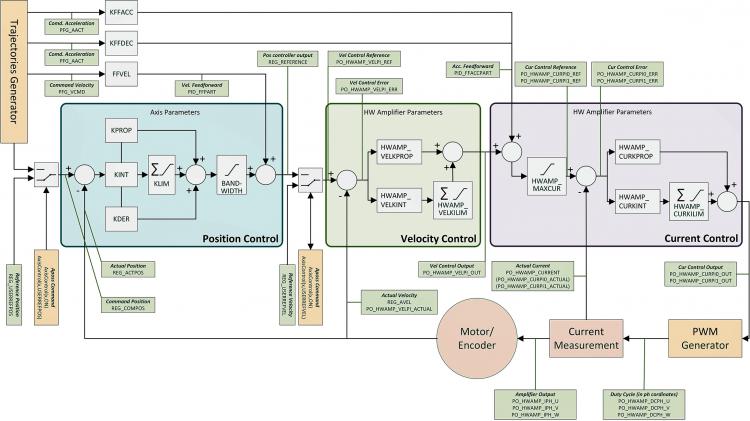
Exemple de commande en cascade avec un contrôleur de mouvement maxon tel que le MiniMACS6-AMP4. La programmabilité et la planification de la trajectoire intégrée signifient qu'un contrôleur de niveau supérieur n'est pas strictement nécessaire.
Trouver le bon contrôleur
Un contrôleur approprié peut être développé en utilisant différentes stratégies de conception. Les structures de contrôle appropriées pour un pendule inversé comprennent les contrôleurs PID, LQR, flous ou neuronaux à apprentissage automatique. Le système physique à plusieurs degrés de liberté peut être modélisé mathématiquement. Pour le balancement du pendule à partir de la position de repos (position zéro), des approches non linéaires telles que des approches énergétiques sont nécessaires. Un contrôleur approprié est alors conçu à l'aide de la description mathématique. Ce contrôleur peut être approximé ou discrétisé pour les systèmes capables de fonctionner en temps réel et transféré à un contrôleur tel que le MiniMACS6-AMP4.
Le contrôleur compact
Le maxon MiniMACS6-AMP4 est un contrôleur maître programmable avec des étages de puissance intégrés. Il s'agit du contrôleur de stabilisation pour le pendule inversé rotatif. Cela permet d'exécuter des modèles de mouvement complexes avec des commandes simples, par exemple pour une synchronisation sans à-coups avec un axe maître rotatif. Avantages du contrôleur multi-axes MiniMACS6-AMP4 :
- Assume la fonction de maître ; aucun contrôleur de niveau supérieur n'est nécessaire.
- Fonctionnalité de contrôle de mouvement sans licence incluse
- Solution d'entraînement compacte avec étages de puissance intégrés
Le logiciel d'automatisation sans licence ApossIDE (environnement de développement intégré) peut être utilisé pour configurer les tâches de positionnement et de synchronisation à l'aide de commandes simples ou vous pouvez exécuter vos propres algorithmes de contrôle en utilisant le langage C (ApossC).

En action : Le MiniMACS6-AMP4 stabilise le pendule inversé rotatif.
Contrôleur multi-axes COMPACT MiniMACS6-AMP4
Le contrôleur multi-axes programmable avec étages de puissance intégrés est le contrôleur stabilisateur du pendule inversé rotatif et assure une synchronisation sans à-coups avec l'axe rotatif.