Tags
Author
Pour les applications de moteurs à courant continu qui nécessitent un couple élevé dans une enveloppe légère et compacte, les moteurs à 4 pôles peuvent être le choix optimal. Un moteur à 4 pôles peut tenir dans le même encombrement qu'un moteur à 2 pôles, mais il est capable de générer un couple plus important. Il est important de noter qu'un moteur à 4 pôles est également plus résistant qu'un moteur à 2 pôles de taille équivalente, ce qui signifie qu'il maintient mieux sa vitesse lorsqu'une charge est appliquée.
Le nombre de pôles expliqué - la vitesse
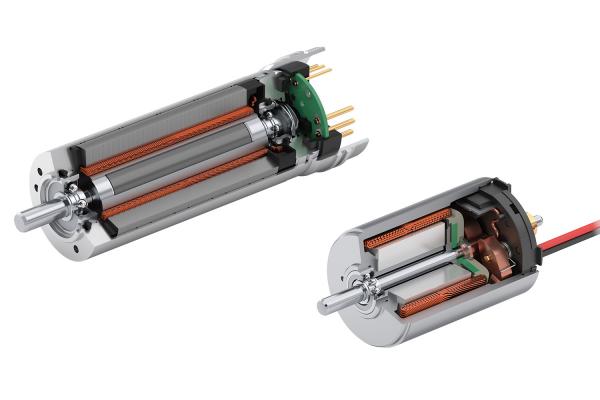
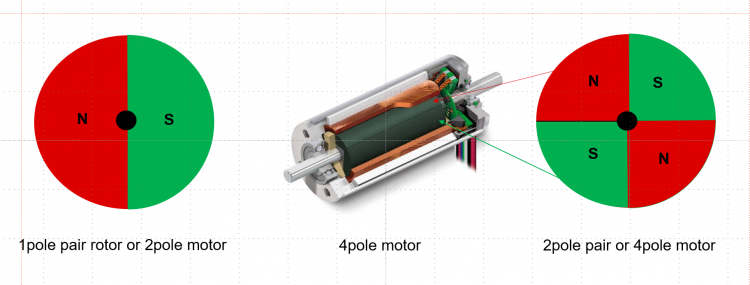
Le nombre de pôles désigne le nombre de paires d'aimants permanents dans un moteur. Les moteurs à 2 pôles ont une seule paire d'aimants en position opposée nord et sud. Lorsqu'un courant est appliqué, un champ magnétique est créé entre les paires d'aimants, ce qui oblige le rotor à tourner. Les configurations de moteurs comprennent également les moteurs à 4 pôles, qui comprennent deux paires d'aimants, et les moteurs multipolaires, qui comprennent jusqu'à 12 pôles.
Le nombre de pôles est un aspect important de la conception d'un moteur car il a un impact sur les caractéristiques de vitesse et de couple du moteur. Plus le nombre de pôles est faible, plus la vitesse du moteur est élevée. En effet, chaque révolution mécanique du rotor dépend de l'achèvement du cycle du champ magnétique de chaque paire de pôles. Plus le nombre de paires d'aimants permanents d'un moteur est élevé, plus le nombre de cycles de champ magnétique nécessaires est important, ce qui signifie que le rotor met plus de temps à effectuer une révolution de 360°. La vitesse est divisée par le nombre de paires de pôles à une fréquence fixe. Ainsi, en prenant comme base un moteur à 2 pôles de 10 000 tr/min, un moteur à 4 pôles génèrerait 5 000 tr/min, un moteur à 6 pôles fonctionnerait à 3 300 tr/min, et ainsi de suite.
Le nombre de pôles expliqué - le couple
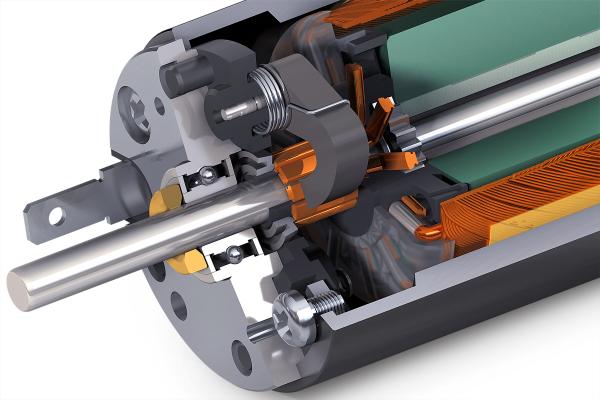
Indépendamment du nombre de pôles, un moteur plus grand peut générer plus de couple. Mais, en comparant des moteurs de même volume, l'augmentation du nombre de pôles lui permet de générer plus de couple. Si l'on prend un moteur à 4 pôles, son couple est considérablement augmenté parce que sa conception compacte se caractérise par un chemin de retour magnétique plus fin, permettant plus d'espace pour une paire d'aimants permanents et, dans le cas des moteurs maxon, un enroulement tricoté plus épais breveté.
Bien qu'un moteur à 4 pôles puisse tenir dans le même encombrement qu'un moteur à 2 pôles, il convient de noter que l'extension du nombre de pôles, de six à 12, signifie que la taille et la masse du châssis doivent augmenter en conséquence pour accueillir le cuivre, le fer et les aimants supplémentaires nécessaires. Ainsi, en prenant comme base un moteur à 2 pôles de 10 000 tr/min, un moteur à 4 pôles générerait 5 000 tr/min, un moteur à 6 pôles fonctionnerait à 3 300 tr/min, et ainsi de suite.
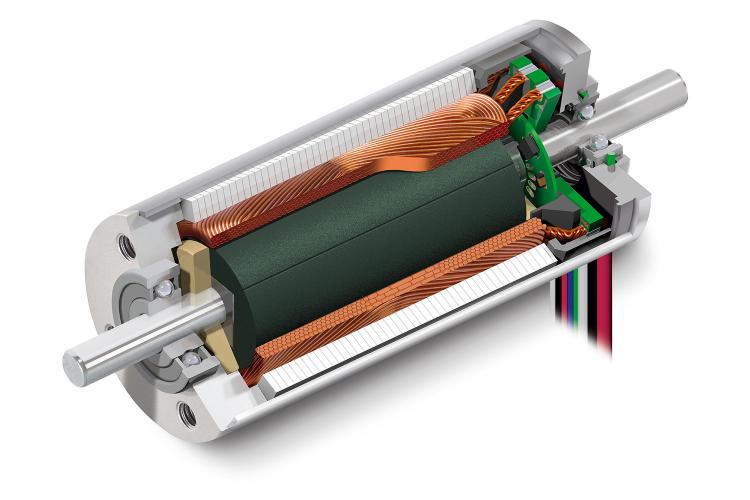
Les moteurs EC 4pôles de maxon maintiennent la vitesse sous des charges élevées.
Les moteurs à 4 pôles sont plus puissants
La puissance d'un moteur est généralement définie par son gradient vitesse-couple, ce qui signifie qu'un moteur plus puissant peut mieux maintenir sa vitesse lorsqu'une charge est appliquée. Le gradient vitesse-couple est mesuré par la réduction de la vitesse pour chaque 1mNm de charge. Plus le chiffre est bas et le gradient faible, plus le moteur est capable de maintenir sa vitesse sous charge.
Un moteur plus puissant est obtenu grâce aux mêmes attributs de conception qui l'aident également à atteindre un couple plus élevé, tels que des enroulements plus nombreux, et en utilisant les meilleurs matériaux pour leur fabrication. C'est pourquoi un moteur à 4 pôles est plus puissant qu'un moteur à 2 pôles de taille équivalente.
Par exemple, un moteur maxon 4 pôles de 22 mm présente un gradient vitesse-couple de 19,4 tr/min/mNm, ce qui signifie que pour chaque 1 mNm appliqué, il ne perd que 19,4 tr/min, alors que le moteur maxon 2 pôles de même hauteur de cadre présente un gradient vitesse-couple de 110 tr/min/mNm. Tous les fabricants de moteurs n'ont pas les mêmes spécifications de conception et de matériaux que Maxon. Le gradient vitesse-couple d'un moteur 2 pôles d'une autre marque peut donc être plus élevé, ce qui signifie que le moteur est plus faible.

Quand faut-il utiliser un moteur à 4 pôles ?
Les applications de l'industrie aérospatiale bénéficient de la résistance accrue d'un moteur à 4 pôles combinée à un faible poids. Ces caractéristiques sont également nécessaires pour les outils électriques portatifs qui ont souvent besoin d'un couple supérieur à celui qu'un moteur bipolaire peut fournir, tout en conservant une faible masse et une petite taille.
Les caractéristiques des moteurs quadripolaires sont également importantes pour les fabricants de robots mobiles. Qu'il s'agisse d'inspecter des oléoducs ou des gazoducs ou de rechercher des victimes de tremblements de terre, les robots à roues ou à chenilles doivent négocier des terrains accidentés, des obstacles et des pentes raides. Les moteurs à 4 pôles fournissent le couple et la force nécessaires pour surmonter ces charges, tout en aidant les fabricants de robots mobiles à obtenir une conception compacte et légère.
Une petite taille combinée à un faible gradient de vitesse-couple est également essentielle pour l'inspection des forages de fond dans le secteur du pétrole et du gaz. Pour cette application, un moteur compact à 2 pôles ne serait pas assez puissant, tandis qu'un moteur à plusieurs pôles serait trop grand pour s'adapter à l'enveloppe de l'espace d'inspection du trépan, maxon a donc conçu spécifiquement un moteur à 4 pôles de 32 mm pour s'adapter.
Optimisation d'un moteur à 4 pôles
De nombreuses applications pour lesquelles un moteur 4pôles est adapté se déroulent dans des environnements ou des conditions extrêmes, nécessitant la capacité de fonctionner à des températures, pressions et vibrations élevées. Par exemple, les moteurs utilisés pour l'inspection des forages en fond de trou peuvent devoir fonctionner à des températures supérieures à 200°C, tandis que ceux installés dans les véhicules sous-marins autonomes (AUV) sont montés dans des boîtiers remplis d'huile capables de résister aux pressions les plus élevées à des profondeurs allant jusqu'à 6 000 mètres. En spécifiant des caractéristiques de conception supplémentaires telles que des manchons ainsi que des techniques pour améliorer la dissipation de la chaleur, les moteurs compacts à 4 pôles peuvent gérer des conditions de fonctionnement extrêmes à long terme.
Si la spécification du moteur est fondamentale, pour optimiser une application, il convient de prendre en compte la conception du système d'entraînement complet, y compris les réducteurs, les codeurs, les variateurs et les commandes. En plus de donner des conseils sur les spécifications du moteur, les ingénieurs de maxon peuvent collaborer avec une équipe de conception OEM pour développer un système d'entraînement complet spécifique aux exigences de l'application.
-
 maxon EC 4pole 20 200W
maxon EC 4pole 20 200W -
 EC 4pole 22 + GP24
EC 4pole 22 + GP24 -
 EC 4pole 30 long + GP32 avec codeur MR
EC 4pole 30 long + GP32 avec codeur MR