Tags
Author
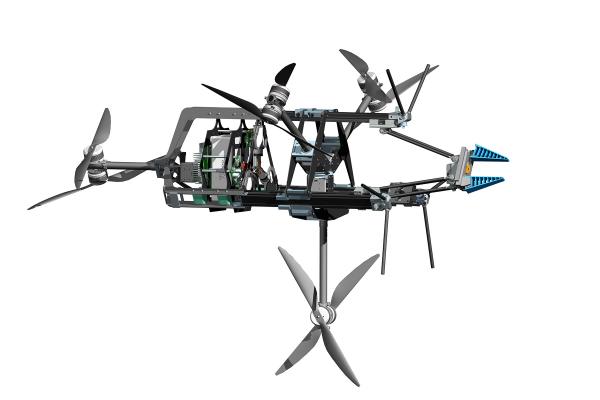
"Ascento" est le nom donné à cet appareil sophistiqué par ses créateurs, une équipe de huit étudiants en génie mécanique et un en génie électrique. Le robot est assez spécial : il se déplace et s'équilibre sur deux roues. Du point de vue de l'ingénierie, c'est beaucoup plus difficile que de construire un appareil sur quatre roues. Cependant, un robot bipède offre une bien meilleure mobilité et une meilleure adaptabilité aux différents types de terrain.
Et ce n'est pas tout : L'objectif principal des neuf ingénieurs en herbe est de faire bondir le robot. Ils veulent qu'il soit capable de sauter haut, comme un kangourou, et de retomber en toute sécurité sur ses deux roues. "Cela permettrait au robot de maîtriser les escaliers et autres obstacles", explique l'étudiant Florian Weber. L'équipe d'Ascento est née d'un projet ciblé. Dans ce type de projet, les étudiants de premier cycle de diverses disciplines ont la possibilité d'appliquer leurs connaissances à un projet concret, de l'idée initiale à un prototype fonctionnel.
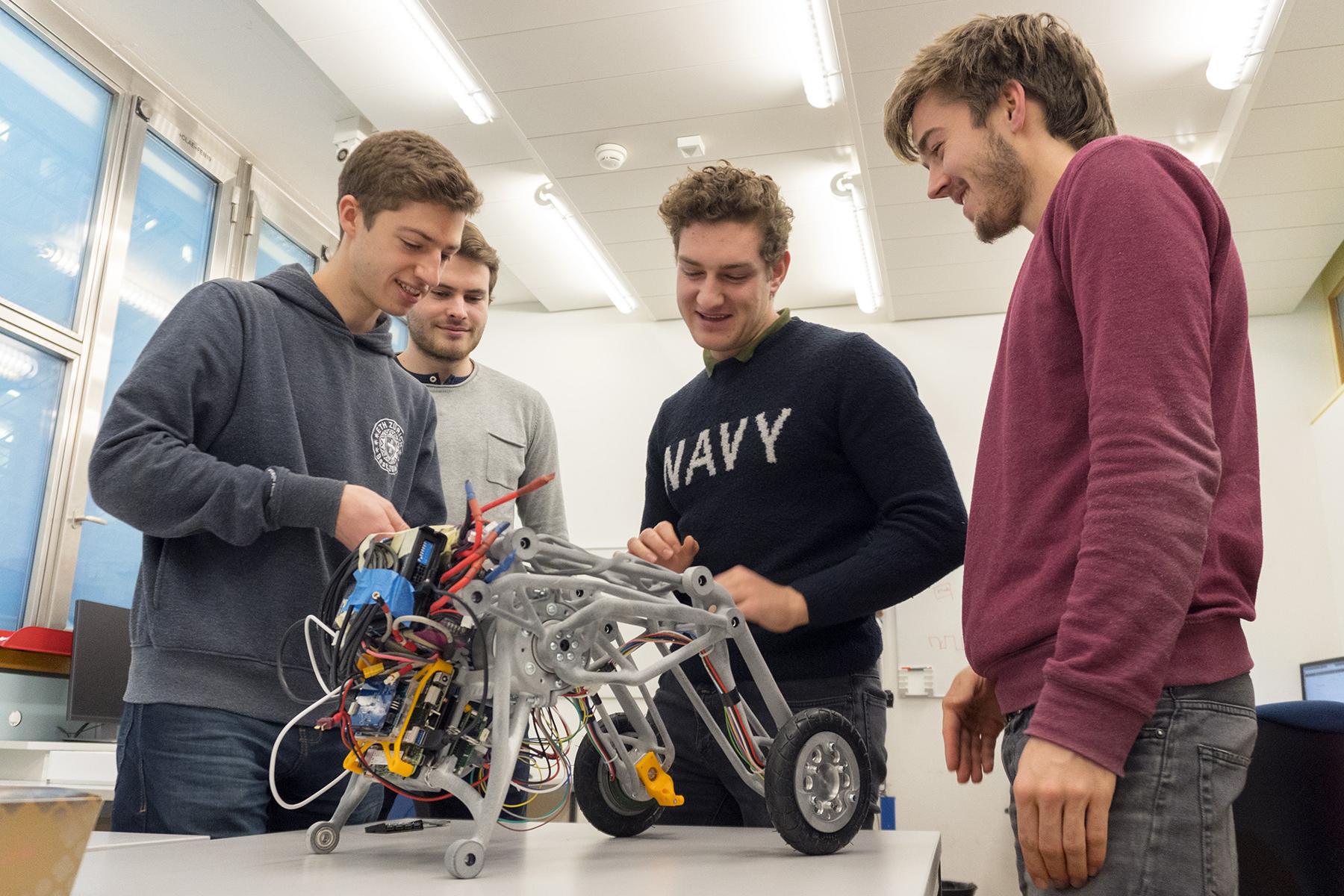
De gauche à droite : Ciro Salzmann, Marcus Vierneisel, Lionel Gulich, Florian Weber
La particularité de l'Ascento est qu'il est conçu comme un pendule inversé : Le centre de gravité se trouve au-dessus de l'axe. Par conséquent, l'Ascento ne peut se tenir debout et se déplacer que tant qu'il est alimenté et qu'il maintient activement l'équilibre sur ses roues - comme un être humain debout, qui doit continuellement dépenser de l'énergie pour maintenir son équilibre. Cela rend l'Ascento comparable à un Segway, qui est également entraîné par deux roues situées sur le même axe et nécessite une conduite contrôlée pour maintenir l'équilibre.
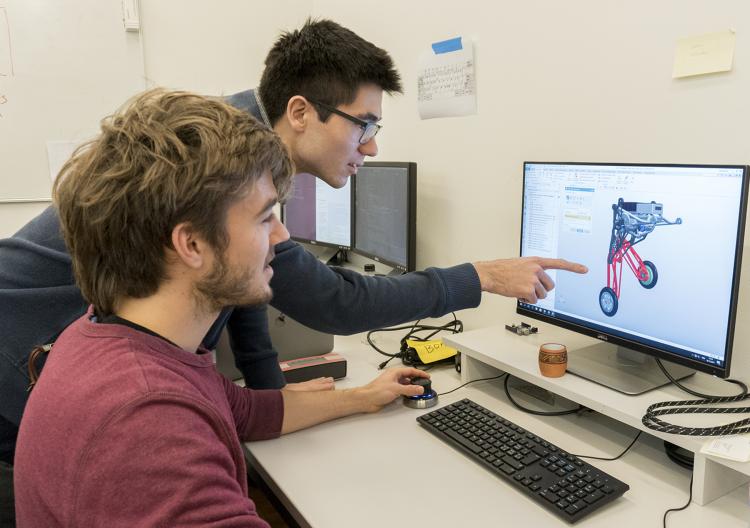
De gauche à droite : Florian Weber, Dominik Mannhart
Les applications potentielles de l'Ascento sont notamment les inspections de bâtiments. Par exemple, le véhicule pourrait pénétrer dans une maison en feu ou menaçant de s'effondrer. Une caméra intégrée fournirait des informations précieuses aux sauveteurs à l'extérieur du bâtiment. Il existe déjà divers robots destinés à ces fins. Toutefois, "surtout lorsqu'il s'agit de monter des escaliers, de nombreux robots atteignent la limite de leurs capacités", explique Marcus Vierneisel, qui fait également partie du groupe de réflexion de neuf personnes. L'objectif de l'Ascento est de lui permettre de monter les escaliers à la vitesse de marche d'un humain. Grâce à sa conception légère à deux roues, l'Ascento est de toute façon plus agile que les autres robots. "D'un autre côté, les robots plus grands sont capables d'interagir avec leur environnement. C'est quelque chose qu'Ascento ne peut pas faire", ajoute Lionel Gulich, étudiant en génie mécanique. Équipé de capteurs, l'Ascento serait capable d'explorer un bâtiment et de fournir des scans 3D des pièces en peu de temps. Bien sûr, le prototype ne sera pas encore capable d'explorer un bâtiment entier à lui seul. Cependant, il pourra s'approcher d'une volée d'escaliers par télécommande, puis utiliser ses capteurs pour mesurer et calculer la hauteur et la longueur des sauts nécessaires pour monter chaque marche. "Déclencher chaque saut par télécommande serait trop compliqué et trop lent", explique Florian Weber. Cela place l'Ascento dans la catégorie des robots semi-autonomes.
Il n'est pas encore certain que le projet focal et le prototype Ascento deviendront un jour un robot d'inspection prêt pour la production commerciale. Mais ce n'est pas l'objectif premier. Les projets focaux servent principalement à permettre aux étudiants de l'ETH de s'essayer à un projet concret au lieu de se contenter de bachoter la théorie.
Les étudiants bénéficient du soutien technique et financier du fabricant spécialisé dans les entraînements, maxon, dans le cadre du Young Engineers Program (YEP) de l'entreprise. Les entraînements de l'Ascento comprennent deux moteurs maxon EC 90 flat. Techniquement, le couple de 963 mNm délivré par ces moteurs est quelque peu surdimensionné lorsque le robot se déplace sur un seul plan. Les entraînements prennent tout leur sens lorsqu'il s'agit d'équilibrer l'Ascento après avoir atterri sur une marche étroite, car cela nécessite un couple élevé et un contrôle précis. Les étudiants de l'ETH ont décidé d'utiliser la version frameless. Le rotor et le stator sont livrés séparément et sans arbre de sortie. Le rotor et le stator ne sont reliés que lors de l'intégration dans un système. En particulier dans le domaine de la robotique, les moteurs frameless de maxon sont souvent le premier choix car ils permettent une intégration peu encombrante et élégante dans les structures articulées. Chaque moteur est piloté par un module EPOS4.