Tags
Author
Un entrepôt avec des robots volants qui transportent des colis. De nombreux inventeurs ont tenté de concrétiser cette vision de l'avenir de l'intralogistique en équipant des quadrocoptères de bras de préhension en série. Mais ces combinaisons drone-bras sont lentes et le bras en saillie entraîne une répartition défavorable du poids qui affecte à la fois la précision et la capacité de charge. En outre, les quadrocoptères ne peuvent tourner que sur un plan horizontal, ce qui signifie que l'effecteur final, dans ce cas, la pince, ne peut pas se déplacer dans toutes les directions. Pour l'instant, la plupart des drones sont encore limités à des tâches d'inspection.
L'automne dernier, une équipe d'étudiants de bachelor en génie mécanique et en génie des procédés de l'ETH Zurich a eu l'idée de développer un robot volant intégré qui ne souffre pas de ces défauts. Les jeunes ingénieurs se sont attaqués au projet central, mis au concours par Autonomous Systems Lab (ASL), et ont construit un manipulateur volant omnidirectionnel - en d'autres termes, un appareil capable d'interagir physiquement avec son environnement.

Daniel Gisler, étudiant en génie mécanique et membre de l'équipe Griffin, avec le manipulateur volant...
Inspiré par une imprimante 3D
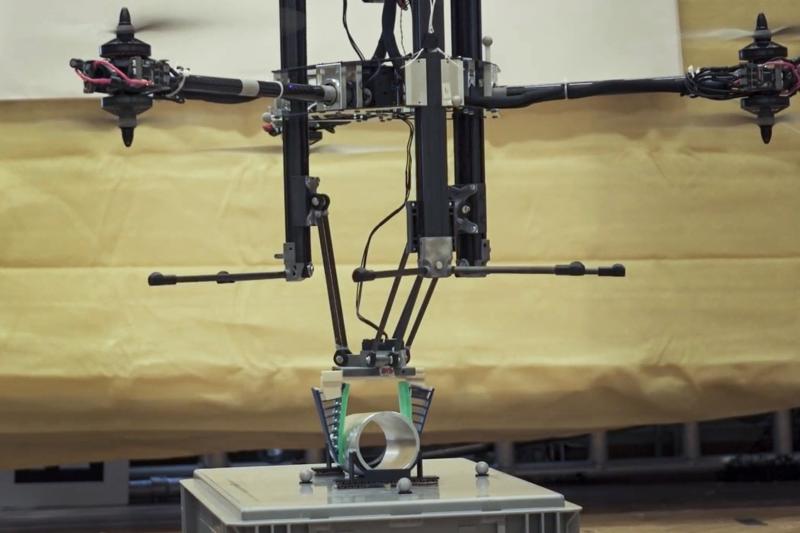
Pour créer un effecteur de haute précision, les étudiants ont installé un bras parallèle linéaire positionné à l'aide de trois glissières qui se déplacent dans une structure prismatique. Les jeunes innovateurs ont équipé le Prismav (Prism Micro Aerial Vehicle) de quatre moteurs alignés différemment, chacun étant composé de deux hélices tournant dans des directions opposées. Cela permet d'équilibrer le mouvement des différentes hélices et d'obtenir un comportement de vol stable.
L'inspiration pour le bras delta est venue de l'intérieur d'une imprimante 3D. Matthias Rubio, étudiant en génie mécanique, explique : "Nous étions debout devant l'imprimante 3D et nous avons eu l'idée d'utiliser la structure intérieure de l'imprimante pour construire une plateforme volante qui combine le vol et la manipulation." Il s'agit d'une nouvelle approche, car ce type de bras delta est encore rare dans les manipulateurs volants.
Le bras parallèle compense les erreurs de positionnement
Les groupes de rotors peuvent tourner autour de leur propre axe. Cela permet à l'objet volant de 7,5 kg de planer dans n'importe quelle orientation. Au cours de ce projet, le drone omnidirectionnel a été utilisé à l'intérieur d'une pièce équipée d'un système de suivi visuel des mouvements, qui garantit une mesure précise de la position et de l'alignement. Prismav est ainsi capable d'interagir avec son environnement et de positionner la pince avec précision. Deux batteries d'une capacité de 20 000 mAh assurent une autonomie de vol d'environ 12 minutes.

Les huit étudiants (sept en génie mécanique et un en génie électrique) de l'équipe Griffin applaudissent après avoir transporté avec succès un cylindre de 500 g en vol.
L'imprécision restante dans les manœuvres de vol est généralement de l'ordre de 10 à 15 centimètres. Pour compenser cela, trois moteurs maxon sans balais positionnent avec précision le bras de préhension. Les trois glissières, qui se déplacent sur des guides linéaires, sont toutes positionnées individuellement au moyen d'une courroie crantée. Grâce à ce système, le préhenseur peut atteindre n'importe quelle position dans l'espace 3D marqué. Pour gagner du poids sans compromettre la force, l'équipe a choisi les moteurs compacts ECX TORQUE 22 M.
Pour les zones dangereuses ou inaccessibles
Avec Prismav, les étudiants ont établi les bases d'une recherche plus approfondie. Matthias Rubio ajoute : "Nous avons démontré qu'un manipulateur volant peut saisir, transporter et déposer un cylindre de 500 g en interagissant avec son environnement." La clé est que le bras de préhension compense les erreurs de positionnement plus rapidement que le drone ne se déplace.
Le projet, présenté en 2021, a été très bien accueilli. C'est pourquoi les étudiants poursuivent maintenant le développement du Prismav dans le cadre de leurs projets de bachelor. Ils optimisent le positionnement automatique, le calcul de la trajectoire de vol et le logiciel de commande, et intègrent un contrôleur intuitif. C'est logique, car le potentiel d'applications est énorme. Par exemple, les robots volants pourraient à l'avenir effectuer des travaux dans des endroits inaccessibles ou dangereux : serrage de vis, montage d'échafaudages, réparation de lignes à haute tension ou encore construction d'ouvrages de protection contre les avalanches.
Auteur : Luca Meister