Tags
Author
Exigences : Concepts de systèmes multi-axes compacts
Les produits tels que les robots chirurgicaux, les instruments d'analyse pour les appareils médicaux et la technologie de laboratoire, ainsi que les collimateurs multilames pour la technologie des rayonnements ont besoin de systèmes d'entraînement miniaturisés pouvant être intégrés dans un espace restreint. Le système d'entraînement idéal comprend non seulement des moteurs électriques, mais aussi des contrôleurs de moteur compacts, capables de fonctionner en réseau et pouvant être intégrés directement dans l'appareil, à proximité du moteur et des capteurs.
Focus : Contrôleurs de moteur miniaturisés
Les principales propriétés des contrôleurs de moteur sont une efficacité énergétique et une densité de puissance élevées, afin de permettre une intégration peu encombrante de tous les composants. Les connecteurs pour divers capteurs et actionneurs, ainsi qu'une interface de bus rapide, sont tout aussi importants. Les modules EPOS4 Micro offrent une large gamme de fonctions standardisées, des algorithmes de contrôle de pointe, un étage de puissance compact, ainsi qu'une interface CANopen ou EtherCAT - et pourtant ils ne sont pas plus grands qu'un timbre-poste (de 32 × 22 × 7 mm). Les fabricants d'appareils peuvent intégrer les modules enfichables dans leur propre électronique pour le nombre d'axes requis. Il est ainsi possible de produire un système multi-axes optimisé en termes de coûts et aux dimensions ultra-compactes.
Interface de bus comme moelle épinière de tout le système
Via l'interface de bus, chaque unité d'entraînement échange des données de commande et d'accès avec le contrôleur maître (par exemple, PLC ou maxon MasterMACS) dans un cycle rapide. Les systèmes de bus de terrain couramment utilisés à cet effet sont CANopen et EtherCAT. Les taux de transmission très élevés d'EtherCAT offrent des avantages, notamment pour les applications complexes à plusieurs axes, mais ils présentent l'inconvénient de nécessiter du matériel supplémentaire et un grand connecteur RJ45 standardisé pour le couplage des différents axes. La taille du contrôleur et du connecteur de bus peut parfois être un obstacle à l'utilisation d'EtherCAT dans les appareils portatifs et la robotique.
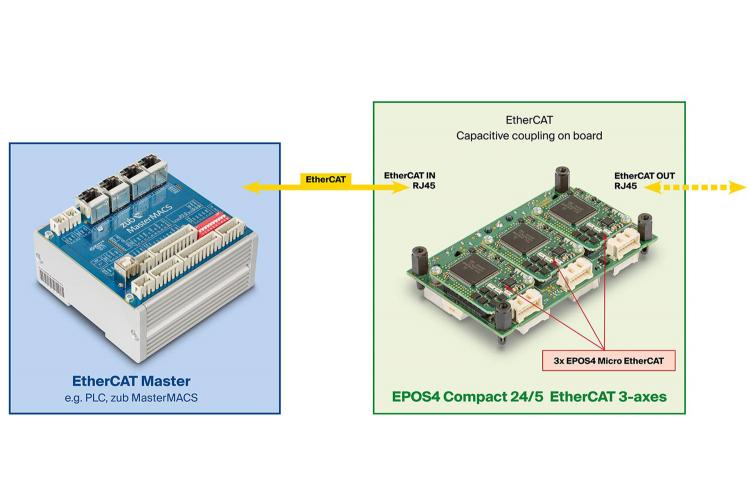
Couplage via RJ45 externe. Couplage capacitif interne sur la carte 3 axes.
Micro, même avec EtherCAT
EtherCAT utilise des capteurs inductifs pour protéger les composants du signal continu en fonction des différences de potentiel, supprimer les interférences et garantir l'intégrité du signal. Cependant, ces composants et les connecteurs RJ45 prennent beaucoup de place sur la carte de circuit imprimé et augmentent les coûts s'ils doivent être intégrés séparément pour chaque contrôleur d'entraînement. Lorsque plusieurs unités EPOS4 Micro sont intégrées dans la même carte électronique, il est possible de connecter en interne les ports EtherCAT à l'aide d'un couplage capacitif. Il s'agit d'une solution très compacte et économique. Des connecteurs RJ45 sont alors uniquement nécessaires pour la connexion EtherCAT externe. Sur la base de ce principe, maxon propose un contrôleur multi-axes extrêmement compact d'une taille d'installation de 90 × 56 mm (la taille d'une carte de visite), équipé de trois modules EtherCAT EPOS4 Micro 24/5.
Micro, et facile à intégrer
Les fonctions d'échange de données et de commande de l'EPOS4 Micro via CANopen ou EtherCAT utilisent le protocole CiA® 402 (Device Profile for Drives and Motion Control). Les modes de fonctionnement standardisés suivants sont pris en charge : "PPM - Profile Position Mode, PVM - Profile Velocity Mode, HM - Homing Mode, CSP - Cyclic Synchronous Position, CSV - Cyclic Synchronous Velocity et CST - Cyclic Synchronous Torque. En tant que contrôleur de mouvement standardisé, l'EPOS4 Micro (comme toutes les versions de l'EPOS4) peut être intégré dans les outils de gestion de système et les bibliothèques de mouvement de divers fabricants d'automates. Les applications qui sont commandées par un PC ou un Raspberry Pi via la bibliothèque de commandes EPOS de maxon sont également possibles.
Micro, et prêt pour l'IIoT
L'EPOS4 est le fournisseur d'informations le plus bas dans l'environnement IIoT (Industrial Internet of Things) d'une machine ou de la chaîne cinématique. Via l'interface de bus EPOS4, il est possible d'accéder aux courants et aux couples du moteur, aux valeurs de position, aux statuts d'erreur, aux valeurs de température et de charge du contrôleur et du moteur, ainsi qu'aux statuts des capteurs et des actionneurs externes, ou encore de transmettre les données de manière cyclique.
Micro, mais multifonctionnel
Avec un cycle de contrôleur de courant de 25 kHz et un cycle de contrôle de vitesse/position de 2,5 kHz, les fréquences de cycle de l'EPOS4 Micro sont identiques à celles de toutes les autres versions de la gamme de produits EPOS4. Des concepts de contrôleur de pointe, tels que la commande orientée vers le champ (FOC), la commande par anticipation et la commande par observateur, ainsi que la commande à double boucle, permettent à l'EPOS4 Micro de fournir des performances moteur et une précision de mouvement maximales. La commande à double boucle avec un codeur incrémental sur l'arbre moteur et un codeur SSI sur l'arbre de sortie permet un positionnement précis de la charge, même sur les systèmes d'entraînement avec jeu, ou les systèmes d'entraînement élastiques.
Micro, mais polyvalent
EPOS4 Micro prend en charge les moteurs DC à balais et sans balais avec des capteurs Hall, des codeurs incrémentaux numériques et des codeurs absolus SSI. Un total de 5 entrées numériques, 3 sorties numériques, 2 entrées analogiques (+/-10 V) et 1 sortie analogique (+/-4 V) permettent la connexion et l'évaluation d'actionneurs et de capteurs supplémentaires.

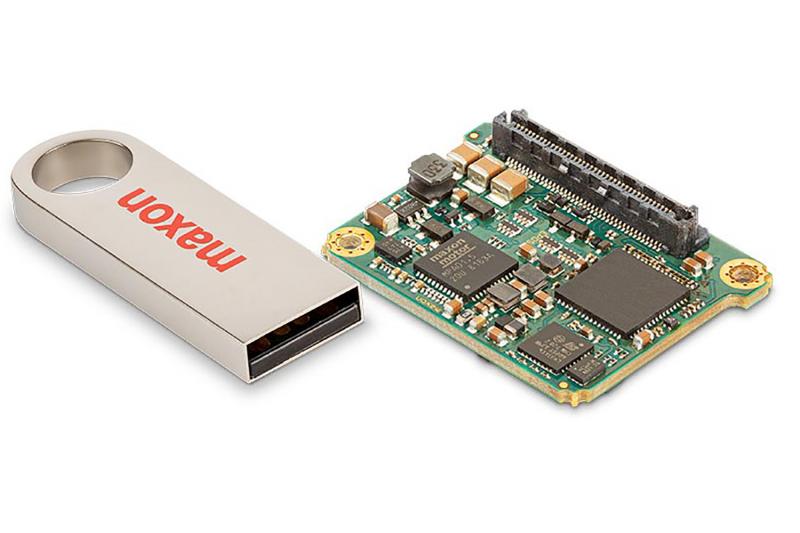
Comparaison des tailles : EPOS4 Micro et clé USB.
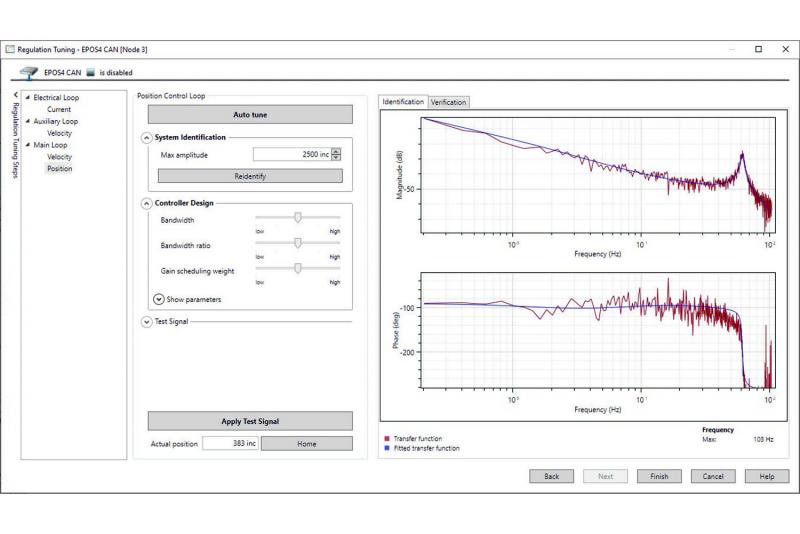
EPOS Studio : Réglage du contrôle à double boucle.
Micro, mais puissant
L'EPOS Micro offre une densité de puissance de plus de 50 W de puissance de crête par cm2 de surface d'installation sans refroidissement supplémentaire dans des conditions de température ambiante de -30° C à 45° C. En pratique, cela signifie une puissance de sortie continue de 120 W et une puissance de crête de 360 W pendant 10 secondes, le contrôleur et l'étage de puissance nécessitant une surface d'installation de seulement 32 × 22 mm ("EPOS 24/5 Micro CAN") et une épaisseur de 7 mm.
Micro, également pendant la mise en service
Le logiciel de mise en service intuitif EPOS Studio comprend l'assistant de démarrage, qui guide l'utilisateur dans la configuration de base et assure le réglage automatique de tous les paramètres du régulateur, même pour les structures complexes de régulateurs à double boucle.
Plus que des produits : maxon, partenaire système
Avec son portail de support support.maxongroup.com et ses différents services, maxon offre bien plus que des produits de catalogue. Pour l'intégration de l'EPOS4 Micro dans des cartes électroniques spécifiques aux clients, maxon est également disponible en tant que partenaire de développement et de production. Dans ce cas, maxon n'est pas seulement le fournisseur du produit, mais assume également la responsabilité de l'ensemble du système en tant que partenaire d'ingénierie compétent dans le domaine de la technologie d'entraînement. Un échange d'informations précoce et la recherche d'idées en collaboration avec maxon constituent le premier pas vers une solution optimale d'un point de vue technique et commercial.
En un mot :
Compétent et orienté vers les objectifs - EPOS4 Micro et les services maxon sont les moteurs du succès.