Le catalogue maxon contient un grand nombre de types de moteurs sans balais que l'on appelle moteurs EC. Cet article décrit brièvement leurs propriétés et leurs domaines d'application possibles.
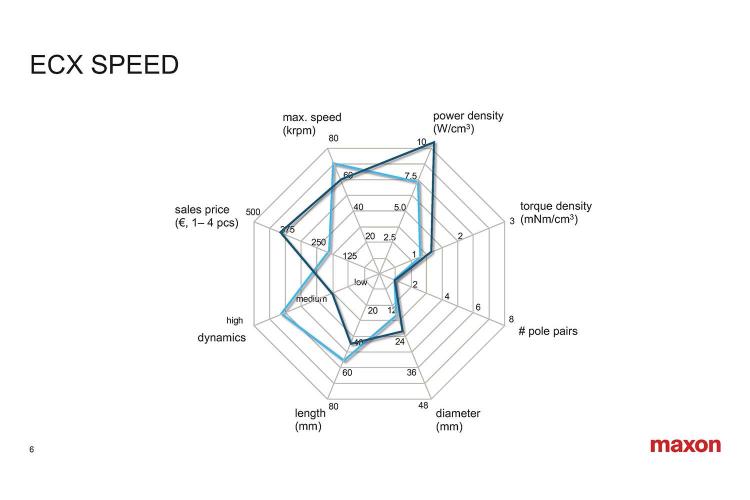
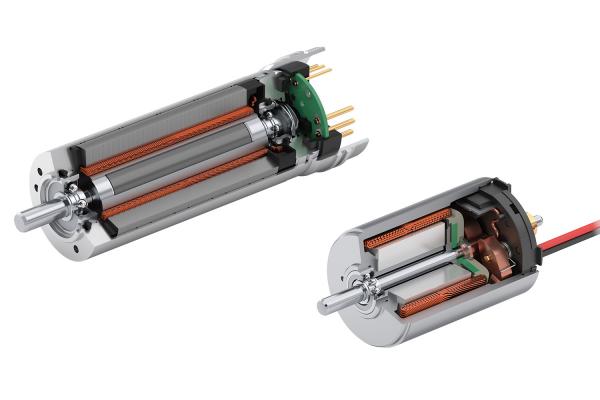
ECX SPEED
- Bobinage maxon sans fer à faible inductance
- Aimant bipolaire sur le rotor interne
- Versions standard et haute performance avec différentes forces magnétiques
- Versions stérilisables avec roulements à billes hybrides (billes en céramique) pour des vitesses encore plus élevées
- Combinaison avec les réducteurs GPX et les codeurs ENX
- Arbre de sortie et interface électrique configurables
Caractéristiques
Comme son nom l'indique, la principale caractéristique de cette gamme de moteurs est la vitesse élevée qui peut être atteinte. Cela donne une densité de puissance (puissance par unité de volume) extrêmement élevée malgré une densité de couple relativement faible. Cependant, cette puissance apparemment élevée ne peut pas être utilisée avec des réducteurs et des dispositifs mécaniques standard, en raison de leurs vitesses d'entrée limitées. Le fonctionnement avec un couple élevé et une vitesse de rotation élevée du moteur n'est possible qu'avec les réducteurs planétaires spéciaux GPX SPEED, dont la vitesse d'entrée est de 50 000 tr/min et plus. La dynamique relative se situe dans la gamme moyenne. Des codeurs incrémentaux ou absolus monotour peuvent être intégrés aux moteurs ECX SPEED, même en version stérilisable.
Applications
Les applications typiques des moteurs ECX SPEED sont les outils portatifs à haute vitesse, comme les meuleuses. Les versions stérilisables des moteurs et même des combinaisons moteur-réducteur-codeur permettent d'utiliser ces produits dans des outils chirurgicaux. Dans ce cas, la configuration avec des connexions enfichables est une option intéressante.
Remarque particulière :
Les enroulements des moteurs ECX SPEED ont une très faible inductance en raison de leur conception sans fer. L'alimentation d'un tel moteur par un étage de puissance PWM, comme c'est le cas avec la plupart des régulateurs modernes, entraîne une ondulation du courant. Diverses applications ont montré que cette ondulation du courant peut entraîner un échauffement indésirable du moteur de 40 degrés ou plus. Les pertes de ce type peuvent même devenir le facteur de chauffage dominant en fonctionnement à vide. L'augmentation de la fréquence PWM peut aider, mais la meilleure façon d'éliminer l'ondulation du courant est d'ajouter des inductances.
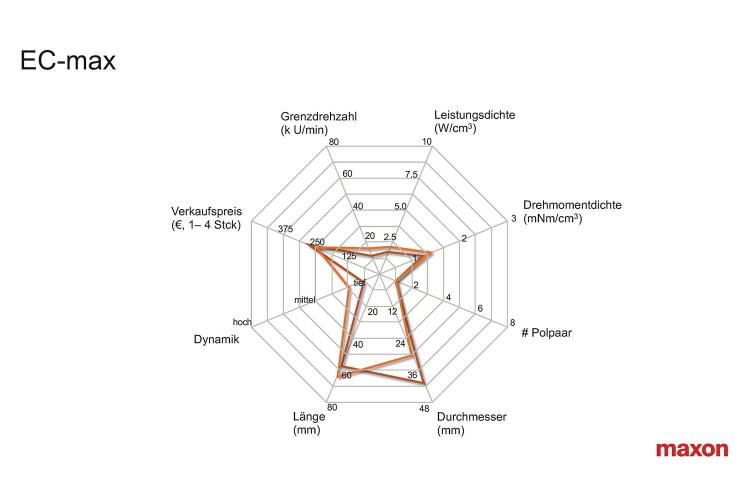
EC-max
- Bobinage maxon sans fer à faible inductance
- Aimant bipolaire sur le rotor interne
- Gamme de diamètres : 16 mm, 22 mm, 30 mm et 40 mm, chacun dans une version courte et une version longue.
- Combinaisons standard avec des réducteurs en version céramique et des encodeurs. Des freins de maintien sont également possibles.
Caractéristiques
La gamme EC-max offre des moteurs à coût optimisé pour les applications standard qui requièrent un moteur sans balai avec une longue durée de vie. L'accent étant mis sur le coût, leurs attributs de couple et de vitesse sont modérés, avec une faible densité de puissance et une faible réponse dynamique. Les moteurs EC-max peuvent être parfaitement combinés avec les réducteurs en céramique de maxon pour créer des motoréducteurs à longue durée de vie. Les vitesses relativement faibles des moteurs correspondent aux vitesses d'entrée limitées des réducteurs standard, ce qui porte les couples modérés des moteurs à un niveau utilisable.
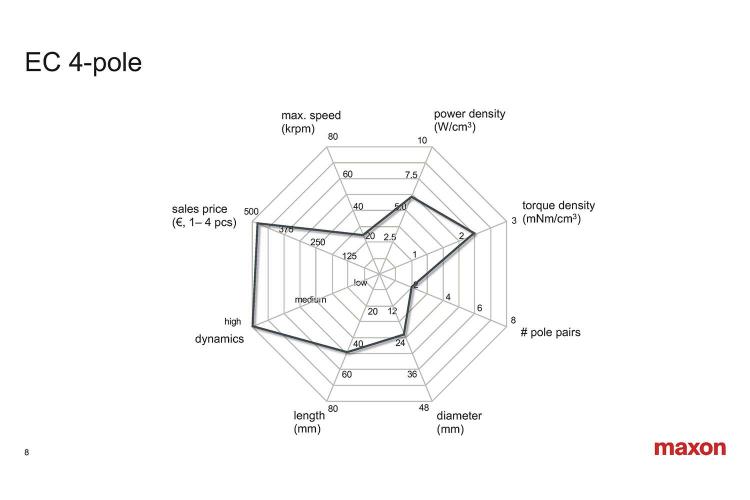
EC 4-pole
- Bobinage maxon hexagonal sans fer avec disposition optimisée des segments de bobinage pour 4 pôles magnétiques
- 4 pôles magnétiques (2 paires de pôles) sur le rotor interne
- Gamme de diamètres : 22 mm et 30 mm, ce dernier également en version stérilisable.
- Combinaisons avec des codeurs optiques et robustes ENX de haute précision. Des freins de maintien sont également possibles.
- Des combinaisons avec des réducteurs sont possibles
Caractéristiques
Le EC-4pole a une conception de moteur optimisée en termes de puissance, fournissant à la fois un couple élevé et une vitesse relativement élevée (25 000 tr/min). Le résultat est un moteur hautement dynamique avec une puissance élevée par unité de volume. L'utilisation de matériaux magnétiques à haute performance, la disposition complexe des enroulements et la commutation optimisée se traduisent par une conception complexe.
Applications
Le EC-4pole est un moteur destiné aux entraînements directs dynamiques et de haute précision. Son couple relativement élevé peut rendre superflus les mécanismes et réducteurs supplémentaires. Les codeurs optiques à haute résolution sont parfaits pour un positionnement précis et rigide et pour le contrôle de faibles vitesses.
Versions spéciales
Le moteur de 30 mm constitue la base de plusieurs versions plus spécialisées qui sont utilisées dans l'industrie aérospatiale. Parmi les modèles spéciaux à 4 pôles, citons les moteurs à usage intensif de 32 mm destinés à des conditions environnementales extrêmement difficiles (en termes de température et de pression), voire à une immersion dans un bain d'huile.
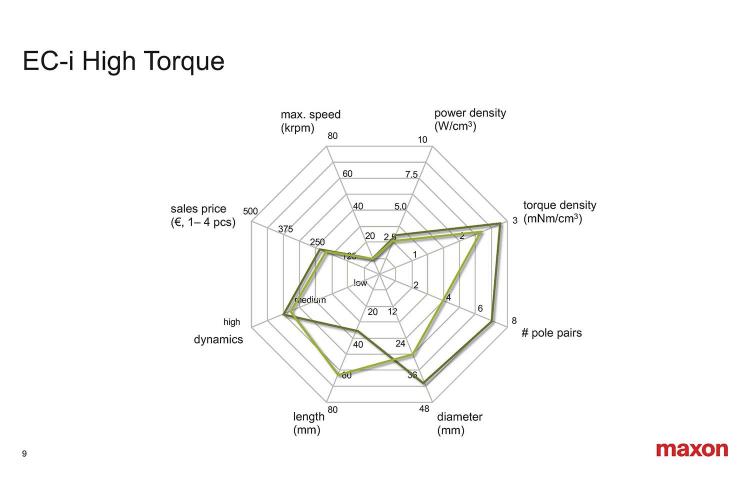
EC-i, IDX
- Enroulement externe à noyau de fer avec une inductance relativement élevée
- Rotor interne multipolaire avec jusqu'à 8 paires de pôles
- Gamme de diamètres des EC-i : 30 mm, 40 mm et 52 mm ; différentes longueurs.
- EC-i 52 disponible avec boîtier ouvert et ventilation
- IDX : section carrée avec encodeur intégré dans un boîtier industriel, avec connexions électriques, 2 longueurs (M,L)
- Toutes sortes de combinaisons avec encodeurs, freins et réducteurs.
Propriétés et applications
EC-i est une gamme de moteurs puissants avec des couples particulièrement élevés. Ce résultat est obtenu grâce à un nombre élevé de paires de pôles et à un diamètre relativement important. On peut dire que ce sont les grands frères des modèles ECX TORQUE. Le petit diamètre du rotor permet d'obtenir une réponse dynamique moyenne à élevée. Les moteurs EC-i sont généralement utilisés dans les systèmes d'automatisation et de production, ainsi que dans les appareils de laboratoire relativement grands. Le modèle IDX est un moteur destiné à un usage industriel. Dans ces modèles plus grands, notez la déviation substantielle des paramètres du moteur par rapport à une relation linéaire simple. Ceci est dû à l'inductance élevée du noyau de fer.
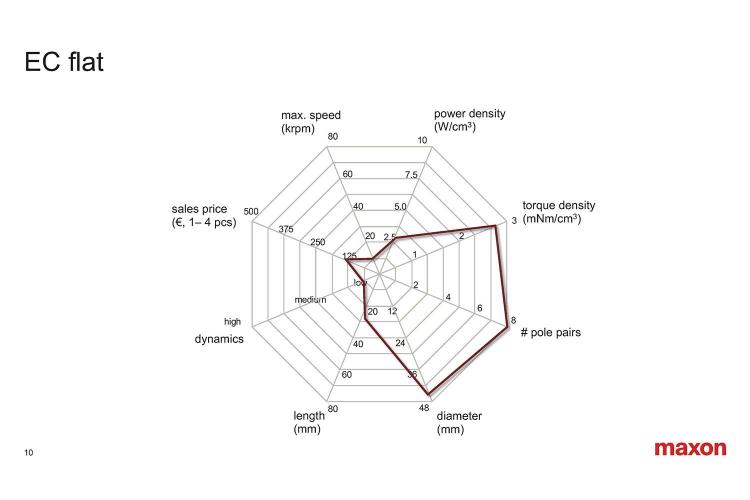
EC flat
- Enroulement interne avec noyau en fer
- Rotor multipolaire externe à forte inertie de masse
- Conception ouverte pour une meilleure dissipation de la chaleur par le flux d'air à travers le moteur à haute vitesse. Peut être encore amélioré par une conception à rotor ouvert et, en outre, par l'utilisation d'un ventilateur.
- Combinaisons avec tous les types de réducteurs. Encodeur MILE intégré
- Versions sans cadre disponibles, avec rotor et stator séparés pour une intégration dans l'application.
Caractéristiques
Comme leur nom l'indique, ces moteurs sont courts mais ont des diamètres relativement importants. La combinaison d'un grand rotor externe avec un nombre élevé de pôles magnétiques leur confère un couple élevé. Cependant, l'inertie élevée de la masse entraîne une réponse dynamique relativement faible. Les moteurs plats sont rentables : Ils sont de loin les moteurs maxon les plus économiques. Notez la déviation des paramètres du moteur par rapport à une relation linéaire simple, en raison de l'inductance élevée du noyau de fer.
Applications
Les moteurs plats sont la solution économique parfaite pour toutes les applications où les dimensions d'installation (en particulier la longueur) sont critiques, et où la réponse dynamique n'a pas besoin d'être extrêmement élevée. Les pompes en sont un bon exemple. Souvent, les moteurs plats ne nécessitent pas de réducteur supplémentaire. Cependant, les combinaisons avec des réducteurs planétaires standard permettent d'obtenir des unités relativement courtes avec un couple élevé. Pour les articulations robotiques et les exosquelettes, ces moteurs sont souvent associés à des réducteurs courts et spécialisés (tels que Harmonic Drive®) afin de répondre aux exigences de couple élevé et aux contraintes de longueur.
ECX TORQUE
- Enroulement du noyau de fer avec une inductance relativement élevée
- Rotor interne multipolaire avec 4 paires de pôles magnétiques (8 pôles)
- Diamètre de 22 mm seulement, avec 3 longueurs différentes (M, L, XL)
- Interfaces d'arbre et électriques configurables identiques ou similaires à celles de l'ECX SPEED
- Combinaisons avec des réducteurs planétaires GPX configurables
- Codeurs incrémentaux ou absolus monotour intégrés (EASY)
Propriétés et applications
Le nom lui-même indique la caractéristique de ce moteur : Il est développé pour des couples relativement élevés et des vitesses modérées. Sa conception longue et mince fait de l'ECX TORQUE un moteur parfait pour les outils portatifs qui nécessitent des couples élevés mais pas de très grandes vitesses, comme les tournevis électriques.
EC frameless DT
- Enroulement externe à noyau de fer avec une inductance relativement élevée
- Rotor interne multipolaire
- Conception plate, courte et sans cadre, avec rotor et stator séparés pour une intégration dans l'application .
Caractéristiques
La conception EC frameless DT combine un couple élevé avec une réponse dynamique. Il s'agit d'une étape supplémentaire vers ce que l'on appelle les "moteurs couples" qui sont intégrés dans les applications et fournissent une commande directe, rigide et sans jeu. Le premier modèle standard sera présenté dans le courant de l'année 2021.
Comparaison des options de conception
Noyau de fer ou enroulement sans fer
Les moteurs maxon sont habituellement fabriqués avec un enroulement autoportant en forme de diamant sans noyau de fer, ce qui permet un fonctionnement du moteur sans cognement. Les enroulements sans fer sont les mieux adaptés aux moteurs longs qui fonctionnent à des vitesses élevées. Ils sont utilisés dans les gammes maxon de moteurs EC de conception longue avec 1 ou 2 paires de pôles, tels que les ECX SPEED, EC-max et EC-4pole.
Les moteurs plus courts de conception multipolaire pour les couples élevés utilisent des enroulements avec des noyaux en fer, comme les gammes ECX TORQUE, EC-i et EC flat. Les pertes supplémentaires en fer dans le noyau limitent la vitesse maximale de ces moteurs.
Multi-pôles ou 1 paire de pôles
L'une des principales questions qui se posent lors de la conception des moteurs est de savoir si le moteur doit être conçu pour une vitesse élevée ou un couple élevé. Un nombre plus ou moins élevé de pôles magnétiques peut être sélectionné en conséquence. D'une manière générale, plus le nombre de pôles magnétiques est élevé, plus le couple du moteur est important et plus la vitesse est faible. Par conséquent, les gammes de moteurs EC maxon pour les vitesses élevées - notamment l'ECX SPEED - ne possèdent qu'une seule paire de pôles, ou au maximum 2 paires de pôles, comme dans le cas de l'EC-4pole. Les moteurs EC maxon pour les couples élevés, comme les gammes ECX TORQUE, EC-i et EC flat, sont équipés de 4 paires de pôles magnétiques ou plus.
Les moteurs dits "moteurs couples" ont souvent un nombre encore plus élevé de pôles magnétiques. Ils sont souvent conçus pour une application spécifique, sous forme d'actionneurs directs à couple élevé qui ne nécessitent pas de réducteurs ou de mécanismes supplémentaires. Cela permet une commande rigide et très précise sans aucune perturbation due à un jeu mécanique. Les moteurs sans cadre de maxon constituent un premier pas vers de tels moteurs couples.
Rotor interne ou externe
La réponse dynamique d'un moteur dépend du rapport entre le couple et l'inertie du rotor, et est exprimée par la constante de temps mécanique. L'inertie du rotor, à son tour, dépend fortement du diamètre du rotor. Plus le diamètre est petit, plus l'inertie est faible et plus le moteur est dynamique, ce qui signifie un temps de réponse plus court.
Par conséquent, pour une réponse hautement dynamique, le diamètre d'un moteur EC doit être petit. Pour y parvenir, le rotor magnétique doit être proche de l'arbre à l'intérieur de l'enroulement stationnaire. Si plusieurs pôles magnétiques sont utilisés, une telle conception avec un rotor interne peut encore générer un couple élevé.
Dans les produits à rotor externe, tels que les moteurs plats EC, le rotor magnétique entoure l'enroulement de l'extérieur. Il en résulte une inertie élevée par rapport au couple généré. Par conséquent, la constante de temps mécanique est considérablement plus élevée.
Il convient de noter qu'outre l'inertie du rotor, d'autres facteurs importants influencent la réponse dynamique du moteur : la force de l'aimant, le courant disponible, la dynamique de la montée du courant (c'est-à-dire la constante de temps électrique), toutes sortes de pertes, etc.