Tags
Author
The human hand is a masterpiece of nature and helped us to become what we are today. We use our hands to assemble the tiniest clockworks, to throw balls, or to communicate when language barriers become difficult. This makes life very hard for people who have lost a hand due to an injury or an accident. Patrick Mayrhofer personally understands such struggles. In a job related accident, he injured his hands so badly that he chose amputation of his left arm shortly afterwards. Yet, the young man did not let this fate knock him down. “I'm very focused on my goals, and when I put my mind on something, I usually succeed at it.” He does not want any special treatment and he does not need it either. With his new prosthetic hand, he masters practically all day-to-day situations without difficulties.
-
 Cutting vegetables with a robot hand.
Cutting vegetables with a robot hand. -
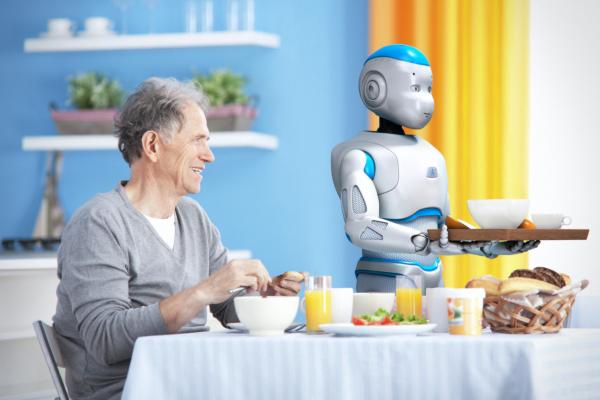
 Serving food: Again possible thanks to the prosthetic arm.
Serving food: Again possible thanks to the prosthetic arm.
The impossible becomes possible
His prosthesis, called the Michelangelo Hand, was developed by Ottobock in Vienna. It can perform seven different gripping movements, which the user can trigger by contracting the muscles in his stump. Tasks that were previously impossible suddenly become possible: Balancing a plate on one's palm, taking an egg from a box, holding a menu, or even peeling a banana. In the words of Martin Wehrle, another Michelangelo user: “With many movements, I simply grab the object without thinking much about it.”
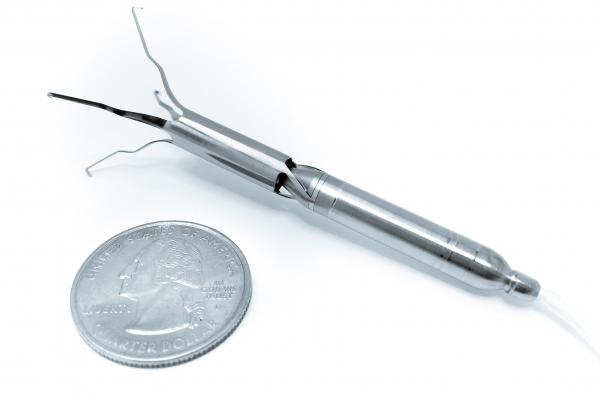
To replicate the human hand as closely as possible, the engineers at Ottobock needed to experiment for many years and had to miniaturize all the electronic and mechanical components in the prosthesis. As a result, it weighs only 520 g and is comfortable to wear. The prosthesis does not only look natural, but it also feels natural - for example when shaking hands. This is due in part to the artificial wrist with its dampened movements. The mechanical systems enabling the gripping functions are driven by a brushless maxon motor, type EC 10, and an adapted version of the EC 45. The first motor drives the thumb, the second is in charge of the main drive for the index and middle fingers. The ring finger and little finger move passively. The EC motor for the thumb has an ironless winding and is also equipped with a worm shaft customized by maxon motor.


Drives with high power density
maxon motor has been supporting Ottobock with special solutions since the company began its development of Michelangelo.
Requirements to the drive system include a high power density, smooth running, and resistance to high axial shaft loads. maxon brushless DC motors meet all these requirements. Additionally, they have a long life span.

Robotic Arm
Requirements to the drive system include a high power density, smooth running, and resistance to high axial shaft loads.

Robotic Hand
The hand has seven different gripping movements.
Sensors for reliable gripping
The interface with the human body is another important aspect of the Michelangelo prosthesis. Ottobock uses electrodes to measure the electrical pulses in the muscles at the stump and sends these signals to a processor. The Axon-Bus data transfer system is extremely fast and reliable. It makes handling the prosthesis easy and intuitive for the user. The harder the user tenses their muscles, the faster and stronger the hand grips. Simultaneously, a sensor in the thumb measures the closing force. This allows for accurate control of the gripping force when an object threatens to fall down.
The Michelangelo Hand gives many users the chance of returning to work. This is especially true of people in the prime of their life who have a family and want to work. These people can profit from the many applications of this prosthesis. Hans Dietl, managing director of Ottobock, says: “We want to give people the highest possible degree of mobility and independence. We work on this daily and will continue to do so in the future.”




Strong replacements
Modern prostheses and implants are high tech systems that can significantly improve the quality of life of their wearers. Researchers hope for further advances through a better interface with the nervous system. See where prostheses and implants are used today.