Le déplacement de charges avec un entraînement électrique se fait généralement avec un système qui utilise un codeur sur l'arbre du moteur pour fournir les informations de position et de vitesse pour le contrôle. Une haute résolution du codeur et une détection précise de la réaction de l'arbre moteur sont essentielles pour le contrôle dynamique de la position. Du point de vue de l'application, cependant, c'est finalement la précision du mouvement de la charge côté sortie qui est critique pour la qualité et la précision dimensionnelle des produits fabriqués. Les réducteurs, les broches et les courroies d'entraînement peuvent avoir un effet négatif sur ce point. Selon la direction du mouvement, le jeu des engrenages peut entraîner une position de charge différente du côté de la sortie. L'élasticité peut provoquer des retards et des oscillations au début ou à la fin du mouvement. La première solution qui vient à l'esprit est de monter le codeur sur l'arbre de sortie, au lieu de l'arbre moteur. Cependant, plutôt que de réussir, cette solution entraîne des performances encore pires du système.
Dans le cas d'un mécanisme avec jeu ou élasticité, le positionnement dynamique et précis de la charge nécessite l'utilisation d'un système dans lequel le contrôle est basé sur deux systèmes de codage :
• Un codeur rotatif, le codeur auxiliaire, est relié de manière rigide à l'arbre du moteur. Il devrait déjà faire partie de la combinaison du moteur.
• Un autre codeur, le codeur principal, est connecté à la charge mobile du côté de la sortie.
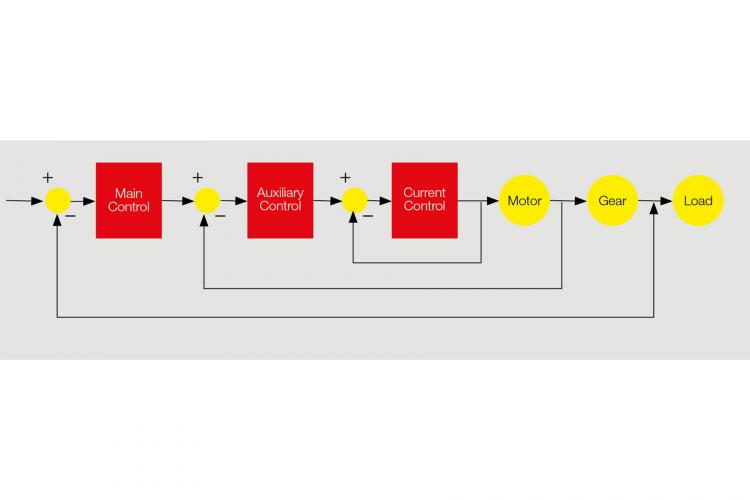
Figure 1 L'architecture à double boucle se compose de trois boucles de rétroaction intégrées.
Pour traiter les signaux de ces deux systèmes de codage, un contrôle à double boucle est nécessaire. Les contrôleurs de positionnement EPOS4 de maxon complètent ce contrôle à double boucle par un filtre de second ordre et un programmateur de gain pour contrecarrer la résonance mécanique et le jeu d'engrenage. Le logiciel de mise en service EPOS Studio fournit un outil de réglage de la régulation qui détermine automatiquement les paramètres de la structure complexe du contrôleur. Il trace également la fonction de transfert de l'entraînement.
Architecture de contrôle
EPOS4 utilise une structure de contrôle en cascade pour le contrôle en double boucle (voir figure 1) :
• La boucle de régulation la plus interne permet une régulation de la commande à flux orienté (= FOC) du courant moteur basée sur la mesure du courant moteur comme signal de retour.
• La boucle de commande centrale (commande auxiliaire) contrôle la vitesse du moteur en fonction du codeur sur l'arbre du moteur.
• La boucle de contrôle la plus externe (contrôle principal) contrôle la position de la charge sur la base du système de codage de la charge.
Une vue détaillée de la structure de contrôle à double boucle d'EPOS4 est présentée à la figure 2.
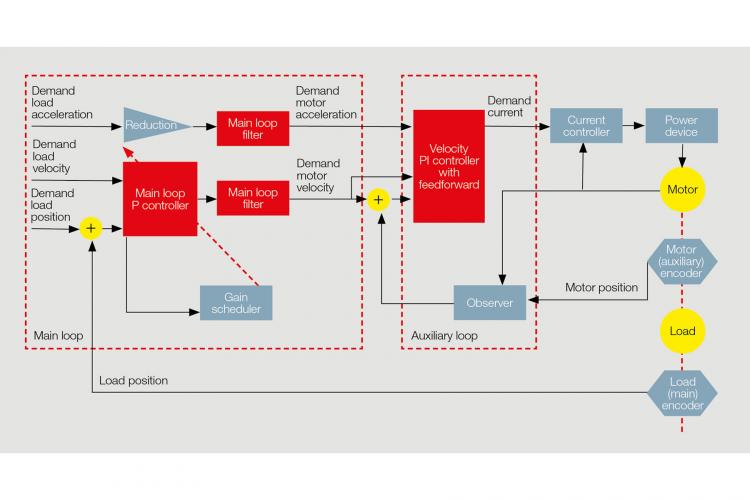
Boucle de contrôle principale
La boucle de contrôle principale est composée d'un contrôleur proportionnel (P), d'un programmateur de gain et d'un filtre de second ordre (le filtre de la boucle principale). Un planificateur de trajet fournit la position souhaitée de la charge ainsi que sa vitesse et son accélération souhaitées comme variables d'entrée pour la boucle de contrôle principale. Une autre variable d'entrée est la position actuelle de la charge, telle que mesurée par le codeur qui s'y trouve.
• Gagner du temps
La commande à double boucle EPOS4 utilise le programmateur de gain pour éliminer les effets négatifs du jeu des engrenages. Pour ce faire, le programmateur de gain ajuste automatiquement le gain P de la boucle de commande principale. Si l'erreur de poursuite - l'écart entre la position réelle de la charge et la position désirée - est trop importante, un gain P élevé sera appliqué, ce qui entraînera une réduction rapide de l'erreur. Lorsque l'erreur de poursuite diminue, le gain P est également réduit, de sorte que l'oscillation ne se produit pas dans l'entraînement, malgré le jeu de l'engrenage.
• Filtre de boucle principale
S'il y a une certaine élasticité entre le moteur et la charge due aux accouplements, aux courroies ou aux longues broches, les fréquences de résonance pourraient provoquer des oscillations d'amplification. Celles-ci pourraient augmenter au point que le contrôle devienne instable. Afin d'éviter cela, le contrôleur à double boucle EPOS4 utilise un filtre de second ordre, de type filtre coupe-bande. Ce filtre supprime la plage de fréquences de résonance dans le signal de sortie de la boucle de commande principale, empêchant ainsi les oscillations harmoniques dans la chaîne cinématique.
Boucle de contrôle auxiliaire
La boucle de contrôle auxiliaire se compose d'un contrôleur proportionnel et intégral (PI) avec feed forward (FF), et d'un observateur qui estime la vitesse du moteur à partir des données de position du codeur du moteur et des mesures du courant du moteur.
Procédure d'auto-ajustement
Pour simplifier la mise en service, le logiciel EPOS Studio de maxon est doté d'un assistant de réglage automatique intégré pour déterminer et valider les paramètres du régulateur à double boucle. La procédure d'auto-réglage consiste en deux expériences qui sont réalisées automatiquement.
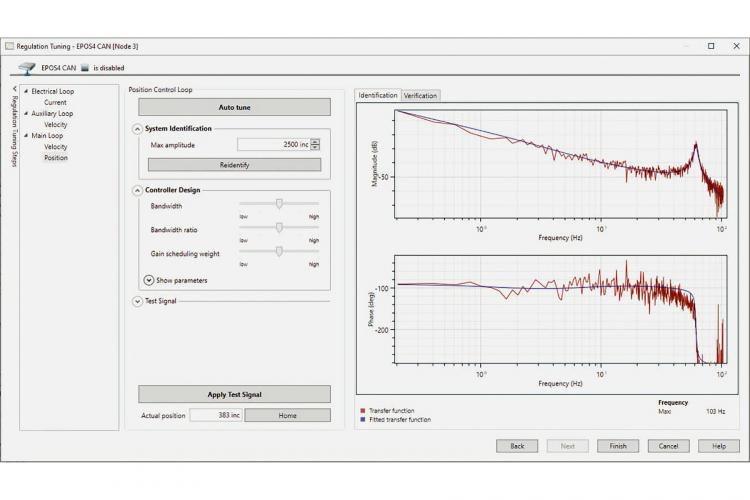
Figure 3 Exemple d'une fonction de transfert identifiée à l'aide d'EPOS4, avec résonance.
• L'expérience 1 déclenche des oscillations de l'arbre moteur. Ces oscillations sont utilisées pour déterminer l'inertie de masse, la constante de couple et la friction dans le moteur. Les paramètres du contrôleur de la boucle auxiliaire et de l'observateur sont ensuite calculés sur la base des données identifiées.
• L'expérience 2 est utilisée pour calculer les paramètres de la boucle de régulation principale et du filtre coupe-bande. Un signal PRBS (= Pseudo-Random Binary Sequence) est utilisé pour exciter la centrale. Sur la base des données d'entrée-sortie résultantes, la fonction de transfert est identifiée et présentée sous la forme d'un diagramme de Bode (voir figure 3).
La parcelle de Bode peut être exportée. Il aide les techniciens de contrôle à analyser le système pour optimiser la conception mécanique et à adapter manuellement la commande pour des applications spécifiques.
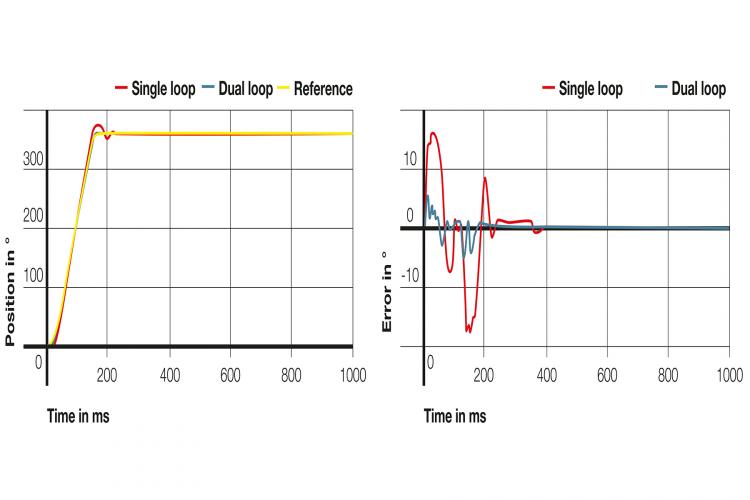
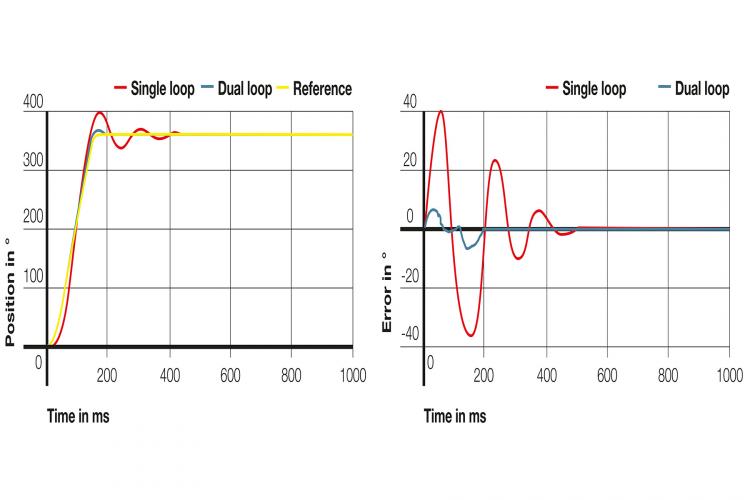
Comparaison de la commande à simple boucle et de la commande à double boucle
Les graphiques suivants montrent les différences de réponse de référence et d'erreur de suivi pour un système avec jeu d'engrenage (figure 4) et un système avec accouplement élastique (figure 5). Les graphiques comparent la commande à boucle unique avec un codeur sur la charge, et la commande à double boucle à réglage automatique avec un codeur sur l'arbre du moteur et sur la charge.
La commande à double boucle est un moyen de rendre les systèmes d'entraînement plus précis et plus efficaces. maxon offre non seulement tous les composants nécessaires, mais aussi une grande expérience en matière de conseil - de l'idée initiale à la production commerciale à grande échelle, en passant par la conception du système.