Tags
Author
"En 2018, j'étais avec un ami propriétaire d'un entrepôt qui déplaçait un mix de marchandises lourdes et de grande taille à la fois sur des chariots et des transpalettes. Il m'a montré qu'il était difficile de déplacer ces chariots rapidement et avec précision, et m'a demandé de l'aide. J'ai réalisé qu'avec un robot de conception spéciale, il serait possible de manipuler une variété de chariots déjà utilisés, en éliminant les problèmes de taille, de poids et de temps", explique Keshav Chintamani, PDG de Tractonomy Robotics, une startup basée à Gand, en Belgique. Et avec une expérience dans la recherche robotique pour le secteur spatial, il est bien placé pour le savoir.
Keshav a constaté que de nombreux véhicules à guidage automatique (AGV) construits pour la manutention de chariots étaient basés sur une conception qui soulevait la charge utile par le bas. Cependant, cela prenait du temps - parfois plusieurs minutes - pour que le robot se positionne sous le chariot, et si le chariot était légèrement mal aligné, l'AGV était obligé de s'arrêter et de se réinitialiser. Le poids que ces robots pouvaient soulever était souvent limité, et le chariot risquait de se renverser.
La recherche s'est tournée vers des AGV capables de remorquer un chariot, mais ces AGV étaient soit attachés en permanence au chariot, soit dotés de mécanismes de connexion d'une précision limitée qui prenaient toujours beaucoup de temps pour s'amarrer. Grâce à la découverte d'un bras de préhension robotisé comme mécanisme d'amarrage pouvant s'accrocher solidement au chariot, la nouvelle conception de Keshav pourra s'adapter à tout type de chariot et le remorquer en toute sécurité.
Afin d'assurer la liberté de déplacement, Keshav a prévu de combiner ce mécanisme d'amarrage avec une plate-forme de robot mobile autonome (AMR). Naviguant à l'aide de lasers pour éviter les obstacles et obtenir des mouvements dynamiques et précis, l'évolution de l'AMR permettrait une manutention plus rapide et plus efficace des entrepôts.
Mouvement omnidirectionnel
L'AMR devait encore se déplacer dans un entrepôt à l'espace restreint pour s'amarrer avec précision à un chariot positionné dans une rangée très dense. Utilisant des roues mécaniques, cette conception omnidirectionnelle permettrait à l'AMR de se déplacer dans des espaces encombrés avec trois degrés de liberté. Cependant, l'étape essentielle pour optimiser la vitesse et la précision de l'accostage, ainsi que le mouvement vers l'avant, a été la spécification d'un système de mouvement précis à quatre roues motrices.
"Les moteurs maxon sont utilisés dans de nombreux projets de recherche universitaires en raison de leurs performances et de leur fiabilité, y compris dans le cadre de la recherche sur le secteur spatial sur laquelle j'ai travaillé, et ils ont donc été mon premier point d'intérêt", explique Keshav.
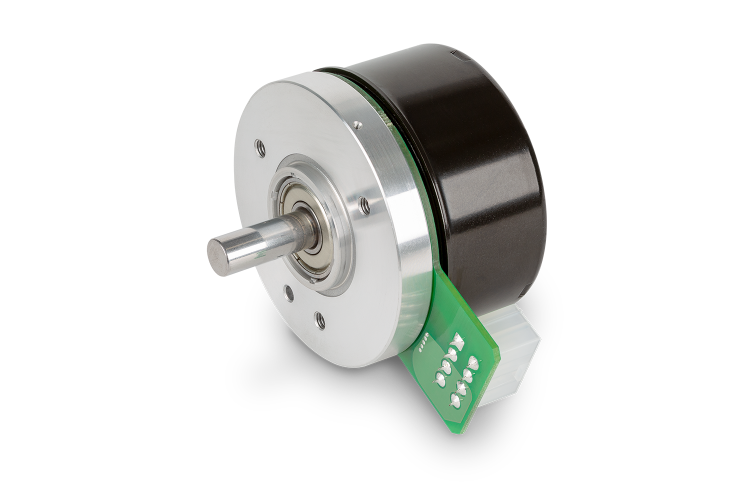
Le système de mouvement devait permettre de remorquer des poids importants, en générant un couple suffisant pour déplacer une charge utile de plusieurs centaines de kilogrammes à partir d'un départ arrêté. Fonctionnant dans des entrepôts exigus, sa première conception d'AMR ne mesurait que 70 cm de long et 50 cm de large, de sorte qu'un moteur compact était essentiel. Après des essais, un moteur DC plat sans balais de maxon, le EC60, a été spécifié pour cette tâche. Avec quatre moteurs par robot - un par roue - la conception devait également être rentable pour une production à grande échelle, étant donné que les moteurs devaient également intégrer des encodeurs à haute résolution.
Densité de puissance élevée
"Nous avons testé ces moteurs dans le prototype ATR1 et ils étaient vraiment impressionnants. Ils étaient capables de tirer un chariot avec le poids de trois personnes debout à bord - et il s'agissait de moteurs vraiment minuscules, d'une largeur de 60 mm seulement", explique Keshav.
Le concept ayant été confirmé, Tractonomy Robotics est né, et le premier modèle a été baptisé ATR1 - Autonomous Towing Robot (robot tracteur autonome). L'ATR1 peut tirer n'importe quel type de chariot pesant jusqu'à 400 kg à une vitesse supérieure à 1 m/s. Aidé par une pile de navigation spéciale, le robot accoste rapidement, et l'ATR peut même détecter les espaces libres et garer automatiquement les chariots. Ce système de navigation utilise des caméras et un système de vision par ordinateur, et la précision du contrôle est le résultat de la vitesse de réponse des moteurs.
L'ATR1 peut accoster les chariots avec précision et fiabilité en moins de 20 secondes et se positionner dans des espaces restreints grâce à des manœuvres latérales, connues sous le nom de "strafing", avec des ajustements subtils pour assurer une précision parfaite", explique M. Keshav.

Demande de remorquage de charges lourdes
Après les essais de l'ATR1, Tractonomy Robotics a reçu des demandes de remorquage de charges utiles plus lourdes, telles que des tôles pesant jusqu'à 800 kg ou plus. Cela a conduit à une conception radicalement nouvelle, l'ATR2, un robot doté d'un système unique d'amarrage adaptatif à deux bras qui lui permet de manipuler des chariots de différentes tailles. Tractonomy a l'intention de produire une version à couple standard et une version à couple élevé de l'ATR2, avec des capacités de remorquage prévues de 600 kg et 800 kg respectivement, atteignant des vitesses comprises entre 1,8 m/s et 2,5 m/s (6,5 kmh à 9 kmh).
Les dimensions de l'ATR2 sont passées de 70x50cm à 90x64cm pour permettre l'utilisation de plus de batteries et d'une nouvelle électronique, mais pour gérer l'augmentation de la charge utile tout en restant dans une empreinte compacte, des moteurs à couple nettement plus élevé ont été nécessaires.
"Les conseils des ingénieurs de maxon nous ont permis d'utiliser un moteur à tension plus faible pour s'adapter à l'ensemble du système, tout en atteignant la vitesse de pointe du moteur et le couple de pointe requis pour la charge plus élevée, tout en respectant les limites thermiques", explique Keshav. "Grâce à ce conseil important, en utilisant seulement deux types de moteurs, nous pouvons offrir une plateforme unique adaptée à une large gamme de chariots et de charges utiles."
When pulling heavy loads at high speeds, stopping power becomes even more important, so the ATR2 includes integrated braking and a 360° safety system that prevents collisions. Operating up to 24 hours a day, component reliability is also key.
“These machines cover 15-20km or more per day under variable conditions. Failures decrease productivity, so it’s very important to have a reliable motion solution,” explains Keshav.
Flexibilité dans la manutention
L'ATR2 entre en phase de validation opérationnelle et Tractonomy se concentre sur la production en série. L'AMR est principalement destiné aux secteurs de la logistique de fabrication et de distribution qui dépendent des technologies de manutention, comme les usines, les entrepôts des grands supermarchés et les services postaux. Les robots peuvent également être utilisés pour charger et décharger des chariots de camions, et peuvent remplacer de manière rentable les trains de remorquage traditionnels et les systèmes de convoyage, tout en constituant une alternative plus sûre et automatisée aux chariots élévateurs à fourche.
Keshav ajoute : "Nous constatons un besoin croissant d'un seul type de machine pour gérer une large gamme d'applications de manutention, car cela réduit les coûts et la complexité de la gestion pour l'utilisateur final. Avec un seul robot qui peut s'appliquer à de multiples fonctions de manutention, Tractonomy offre cette flexibilité."



