Tags
Author
Hanging the laundry out, making breakfast, emptying a dishwasher, holding a pan handle, finding keys in a bag... If these tasks seem simple to able-bodied people, it is a different matter for amputees equipped with a prosthesis. Even more so if they have to carry out these tasks in a certain time, alternating between tests of precision and tests of strength.
People with disabilities competing on everyday tasks: this is the basic idea of the Cybathlon, an international competition where the best pilots of bionic prostheses face off against each other.
The clear winners of the Arm Prosthesis Race in 2022, the Smart ArM team from France's ISIR (Institute of Intelligent Systems and Robotics), are preparing to defend their title in 2023. Not only that, they are already preparing for the 2024 competition, among many other projects. We interviewed Nathanaël Jarrassé, CNRS researcher at ISIR and manager of the Smart ArM project, which relies on maxon technology.

The Cybathlon Challenges 2023 start on March 29. How are you approaching the competition?
Nathanaël Jarrassé: Last year, no one was ready for us. We surprised everyone by coming out of nowhere with a pilot who had the highest level of amputation in the competition and who doesn’t wear a prosthesis in everyday life, competing against osseointegrated pilots who have had a prosthesis connected directly to their skeleton for 20 years. This year, we have gone from being underdogs to defending champions, and I think they are very definitely ready for us this time. The competition is going to be tough!
Do you participate in the Cybathlon every year?
The true Cybathlon happens every four years, like the Olympics. The next one is in 2024, but between them, intermediate events are held – the Challenges. Whereas the true Cybathlon has between 8 and 10 events in a race lasting about ten minutes, these Challenges are scaled-down versions with 1 or 2 events.

What do the Challenges in 2023 consist of?
We will face off in two events:
- Manipulation of small objects: Balls, credit cards, keys, etc.
- Manipulation using strength: We will have to carry almost 8 kg of water from one area to another, loading and unloading a crate.
It is a very representative set of tests, because with your prosthesis, you have to be able to perform tests of strength, such as carrying shopping bags, but without having to change your prosthesis to perform a precision task afterward, like inserting a key into a lock. I’s a real challenge, because it’s a tough test for the prosthesis. Beyond physical strength, it requires concentration, finesse, and dexterity.
In 2022, you won the challenge in the manipulation of small objects. How do you stack up in the strength event?
If nothing breaks, we’re doing well! The strength manipulation is an intense test for the prosthesis. Especially because we are one of the few teams in the competition with a very high level of amputation, and the only team with a motorized active elbow, with a maxon DCX motor. When you carry a bag, with the handle placed on the elbow, the elbow joint takes a lot of strain. It’s the maxon motor that takes the force, even if there is a one-way transmission to limit it. We’re really putting the equipment to the test.
The prosthesis has evolved since 2020 and the last time we spoke. What are the main improvements?
We designed our prosthesis in 2020. It went through major changes in 2022, when we took on the prosthetic hand from New Zealand brand TASKA. We ourselves are specialists in arms, elbows, wrists, onboard systems, and control techniques, but not in prosthetic hand grippers. This new partnership gave us the advantage of a stronger, more dexterous hand, but one that was bigger and a little more complicated to control. Our pilot Christophe Huchet griped a lot, but he got used to it in the end!
More precise sensors, a greater number of electrodes, the use of proportional techniques; we also boosted the performance of the prosthesis, in terms of its batteries, speeds of rotation, motors, etc. Before, our pilot could only carry out movements at one speed, whereas now he can control the speed in addition to controlling the movement.
Finally, we worked on using the prosthesis better, by doing numerous training sessions, to improve sturdiness and capability. As soon as Christophe learns new capabilities, we adapt the prosthesis to take advantage of his new capabilities: more signals, more finesse in the control... So Christophe and the prosthesis develop hand in hand – no pun intended.

Smart ArM's bionic arm prosthesis
Have you made changes to the motorization?
No, we still use customized maxon DCX motors. On the other hand, after talking to maxon’s experts, we are working on replacing all our control board systems with EPOS boards. We are looking forward to having improved joint control by 2024.
Beyond winning the Cybathlon, is it your goal to eventually develop a prosthesis model that can one day be marketed commercially?
Yes. The Cybathlon is a springboard for two things:
- Testing our technology in a real-world situation. Both our mechatronic technology and our control algorithms. The Cybathlon events are tasks from everyday life, so it’s a great yardstick. Since we started participating in the Cybathlon, there are solutions that we no longer allow ourselves to use because we know that they work in the laboratory but not in real life. To put it another way, participating in the Cybathlon helps us to design solutions that are more robust and more effective.
- Publicizing the potential of our research. The Cybathlon is a fantastic showcase for demonstrating to prosthesis manufacturers that our innovations could be used in a realistic setting – that they are not just laboratory technology.
We are especially proud of our control algorithm that utilizes motor compensation analysis. Thanks to this algorithm, our pilot doesn’t have to give orders to the prosthesis: By observing how he uses his body to compensate, the prosthesis is able to work out the movement he wants to make. This is a technology that can totally be used outside the laboratory, and it could really boost people’s capabilities if prosthesis manufacturers integrated it into their technology.
What changes has participating in the Cybathlon brought for you?
Participating in the Cybathlon has transformed the way we do research. We have developed more of a co-design approach, with constant interactions with users, in a real-world ecosystem. We are making a lot of progress on methods for learning to use the prosthesis.
Learning to use the prosthesis is a little like learning to play the violin. We have realized that one of the keys to assistive devices lies less in the technology and more in learning how to use the technology: The aspects of intuitiveness and cognitive load, which we had possibly been neglecting, are fundamental. We are developing methodologies that we will publish, so that they might be applied more generally. The goal is to have protocols to help people with an assistive device get the most out of it.
With that in mind, we and Christophe Huchet aim to set up a cybathletes’ club. This non-profit association would seek to bring people together regularly so that they can come with their prostheses and do the Cybathlon events, compete against champions, time themselves, meet technology producers, meet other users with disabilities, see occupational therapists or kinesiotherapists... Because after all, what we do in a fun setting at the Cybathlon is a lot like what we do in occupational therapy!
Is there also an aspect of rivalry to the competition?
Absolutely. The sporty and playful aspect of the competition, combined with rivalry between peers, plays a major role in the motivation and attractiveness of these tasks. We have also received very positive feedback from occupational therapists who realize that the “competition and timed test” atmosphere creates much more motivation to perform exercises that amputee patients are usually reluctant to do.

What are your other current projects?
The Smart ArM team is going to divide into two for 2024. The idea is not to have two separate teams, but rather the same team, relying on similar control technology but participating in two different events:
- ARM: the Arm Prosthesis Race, with our existing pilot Christophe Huchet, who was born with agenesis of the right forearm, using our prosthesis.
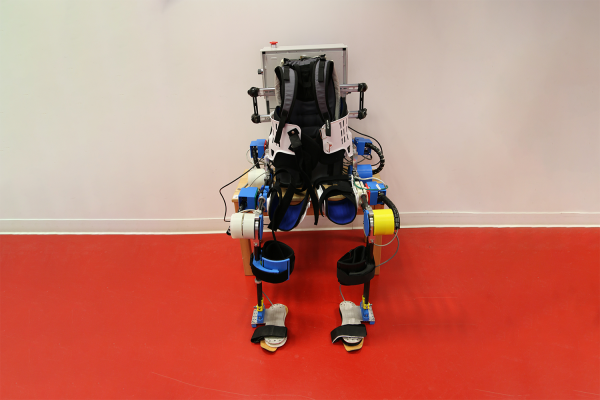
- ROB: the Assistance Robot Race, with our new pilot Etienne Moulet, who is quadriplegic, using a robotic arm installed on a wheelchair.
In the course of our research, we realized that several elements of innovation in prosthesis control could be of interest in other fields. The concept of a prosthesis that reacts to body movement, for instance, can be adapted to a cobot reacting to the movements of the worker with whom the cobot is collaborating, or to someone in a wheelchair wishing to use this arm mounted on their chair as a third arm, or as an extension of an arm which no longer has its full range of movement.
Lastly, there could be some big changes coming up in the next few years…
Meaning?
Our team has been awarded the project “Reinventing the prosthesis” (Réinventer la prothèse). Financed by the PEPR, the funding body of the France Relance 2030 plan, this project will start at the beginning of the academic year 2023 and will bring together about ten partners in the technical and social sciences.
We will be working, among others, with CEA-List and the LS2N laboratory in Nantes, whose expertise will allow us to do high-quality mechatronics work. CEA-List has developed a patented cable cylinder that can be used in the design of a prosthesis, while with the LS2N, we can design a gripper entirely in-house. We will also be working on new control techniques and sensory feedback with partners from INRIA in Marseilles, and we will involve amputees and social science researchers to help us strike a balance between personal development and scientific research. In short, we will allow ourselves to rethink everything. It is therefore very likely that the prosthesis will evolve a lot in the years to come.
We hope to end up with a light, fast, flexible prosthesis that behaves like a human arm. This would open up very different possibilities for prosthesis control – much more natural control. The dream would be to coordinate the prosthesis with a body dancing or playing sport. That involves very high dynamics, which have so far been difficult to attain.