Tags
Author
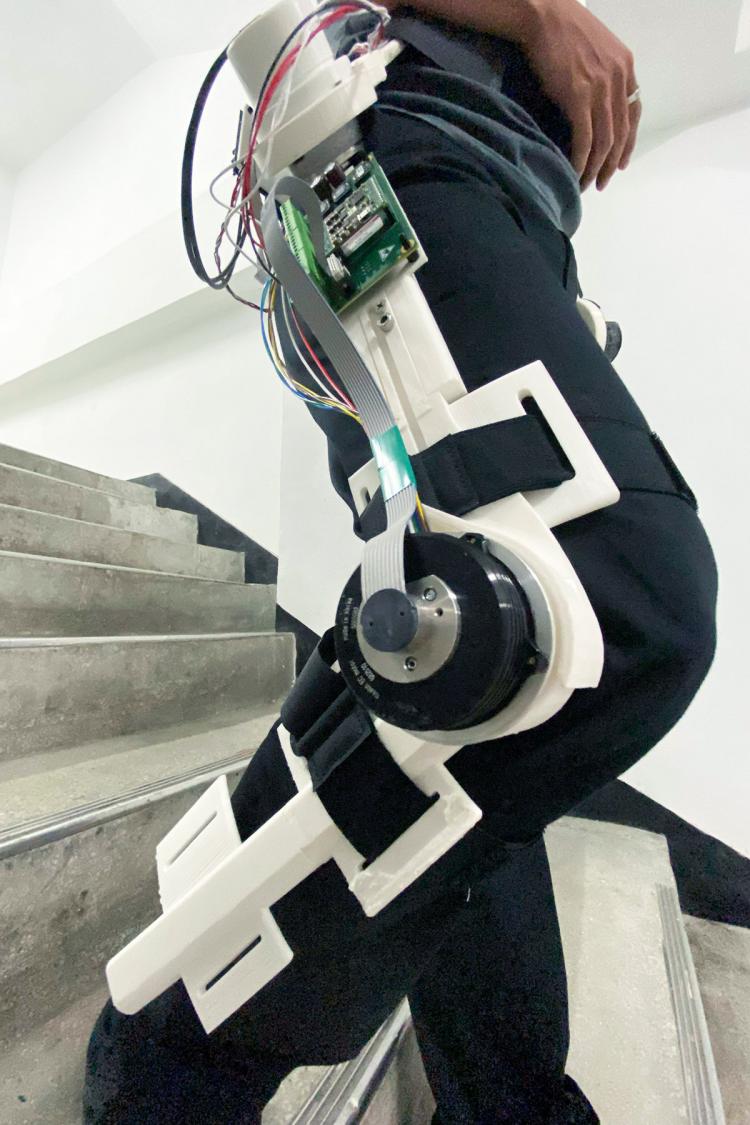
Members of the Mechatronic Engineering department of NTNU have developed a lightweight lower extremity exoskeletal robot to assist people who have difficulty walking. The exoskeleton provides support for the hips and knees.
Exoskeletons have been in development since the mid-seventies and have continued to evolve following advancements with technology. Price, weight, safety, ease-of-use, and a proper fit all pose challenges to developing exoskeletons that are practical for the general public.
Graduate students in the Intelligent Automation/Robotic Lab at NTNU found that—due to heavy motors and batteries—most exoskeletons are difficult for users to put on without assistance. The lack of a user-friendly design means that most exoskeletons are inconvenient and can pose a safety risk to the user. Due to the high cost of hardware, they’re also expensive.
Using maxon DC brushless motors and motor controllers for the hip and knee joints, the students were able to develop a high-torque wearable unit that is smaller and lighter. By incorporating lightweight 3D printed components along with high-efficiency motors from maxon, the exoskeleton provides a nimble, user-friendly solution to an aging population.
The team’s next goal is to extend the development an exoskeleton for the ankle joints and feet, exploiting the same easy-to-wear design as their exoskeleton for the hips and knees.